Good Morning Greg: Ok so i had done everything you suggested, and when i fired everything up i still got the no telem data on the yaapu9 screen on my trans,So i shut everything off and updated the firmware in MP,turned on the trans connected MP now everything seems to work except now i getting this buzz every 5 sec showing bad gps health and the nolock and no sat my MP screen is looking for home the plane is over the pacific off the coast of mexico trying to get back home i guess lol so far i’ts been a hour, So i went to the MP screen Right clicked on my position in Fla told it to fly here WTH so now i guess i’m in guided mode thats what yaapu said and shows on the yaapu telem screen so i think everything is working but i may have to get another compass, Thank You for your help.B.K
Hi Greg: just needed to ask another question so is the flight deck converter the same thing as the ones i bought for the Yaapu? so now i will be able run the yaapu script instead of the flight deck script? just by changing it on the screen?. Thanks B.K
Sometimes, the GPS reception can be very poor indoors. It’s depends on the day. Try it outside or wait for another day indoors. Verify that your GPS connectors are plugged in properly. Sometimes the little pins at the end of the cable push out so you can push them in with a metal pick tool.
Yes, assuming that you bought the correct one for your Pixhawk. I used to use them from Craft&Theory buy now make my own since I have so many planes that use them. Instead of $20 a cable, it’s about $1 for the DIY version.
Yes. The telemetry page script setting tells the Taranis which one to use. You selected “yaapu” on your model telemetry page. Another model could be set up to use the Craft&Theory telemetry.
Thanks Greg: everything’s been working great.The Jumper T16 pro has a delivery date between mid april to mid may ( slow boat from china ) i presume to be back home by then but it has the same screen as the Horus and has the same capability’s and has the colored screen that will give me something to learn while it’s raining everyday like it has been when we get back home. Ok Thanks again Greg can’t wait for the high winds to stop and it’s been 90 deg’s and gusting winds here. B.K
Hi Greg: i cancelled the slow boat since it hadn’t shipped and found a Jumper T16 pro at a US warehouse that would make it here in 3 weeks instead of 2 months, Oh i checked all my Drones that i had Flight deck on and you were right they are the same converters and they all are running the yaapu script now, the wind hasn’t let up and so ill be checking out video’s on setting up the Jumper to run yaapu and transferring all my model’s over and if you would give me the info to be get the things i will need to make my own converters Thanks B.K
Butch,
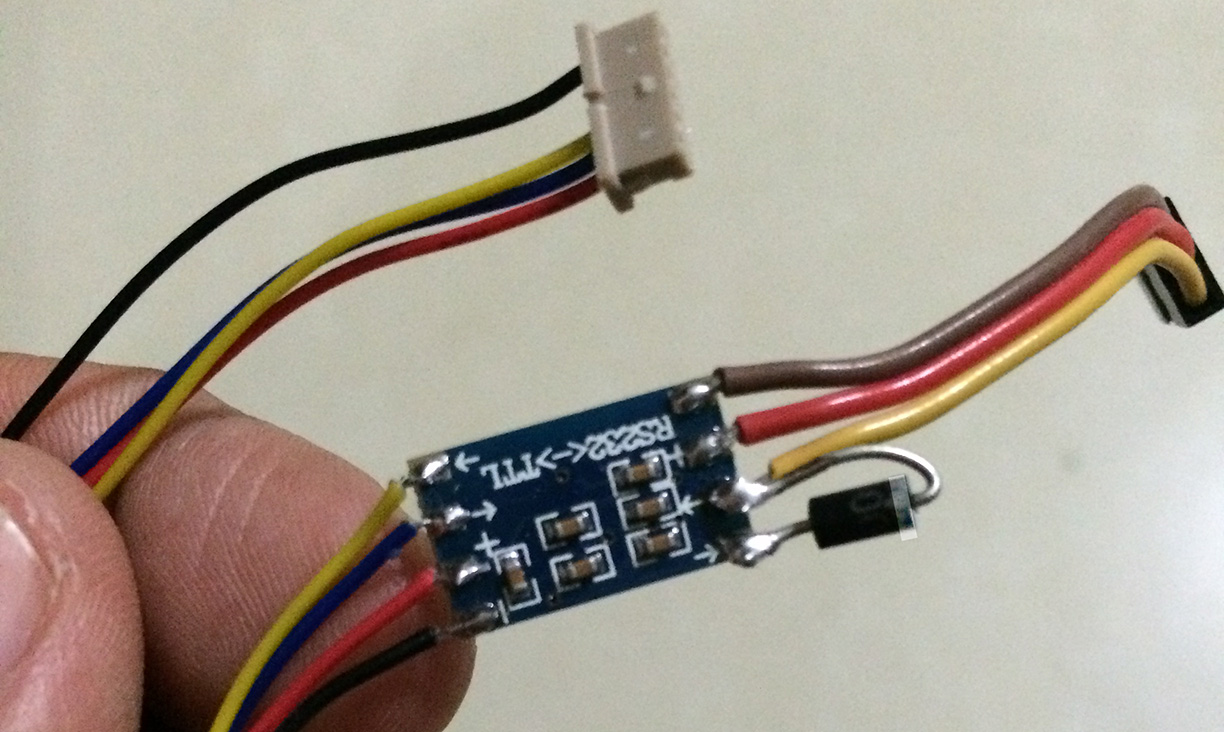
The APM WiKi provides information here on making DIY cables for the S.Port. The lower one in the examples comes from Athertop (Paul) on RC Groups here, which includes links to AliExpress for the low cost components. These components can be purchased from many places.
The photo is all you need for the wiring. One end gets the servo cable to plug into the receiver S.Port and the other gets the 6-pin telemetry connector for your Pixhawk. I originally bought my 6-pin cables on eBay from here but I see that they are sold out. It looks like you can buy them here now in the US. 10 sets for $5 with free shipping from Orlando, FL is a good deal. Make sure that this is the white type of connector Molex you use and not the original light brown connectors from a 3DR Pixhawk. I use the eBay v2.4.8 Pixhawks. After testing the cable assembly in a plane, you can shrink wrap the exposed parts.
Hi Greg: Thank You i got them all 3 items ordered and should arrive by Sat maybe Mon due to this Rv resort’s mail service and if RC-Wing US Warehouse get’s off their duff and ships the Jumper T16 pro Transmitter then it should be here in 10-12 days. So i spent most of the day watching YouTube video t’s by Joshua Bardwell on the Jumper,also video by Built From Home on configuring the jumper to be like what you were showing on your Horus setup.Now i have a different problem i plug a usb into the Pix FC start MP plug it in and once everything starts and i have 12 sats and everything looks good i shut everything down to eat lunch and when i started everything up again just using the Batt to test it now it won’t ARM (No Sats No GPS Fix)so i plugged it into MP to see and the plane is sitting off the coast of Africa and hasn’t moved for 4 hours whew and after 4 1/2 it finaly beeped at me and i looked and it made it’s way back to Fla LOL WOW i don’t get it and now i have Bad AHRS so how do you get rid of Bad AHRS error. Ok Thanks Greg. B.K
Butch,
The “Bad AHRS” message usually comes from moving the plane or from not having enough satellites for a good position (HDOP). Make sure that your telemetry is working so that you can monitor the number of satellites and HDOP on either your transmitter or laptop over wireless. Once you power up the plane, preferably outside, don’t move it.
Here are a few random examples of images for reference. From Mission Planner, on the “Quick” tab, make sure that you display “Sat Count” and “HDOP”. A sat count of 15 or above is good and an HDOP less than 1.0 is good. (Ignore the inverted horizon.)

The display layout for Yaapu telemetry can be found here. The Taranis layout is below. The Sat Count and HDOP are in the upper left.
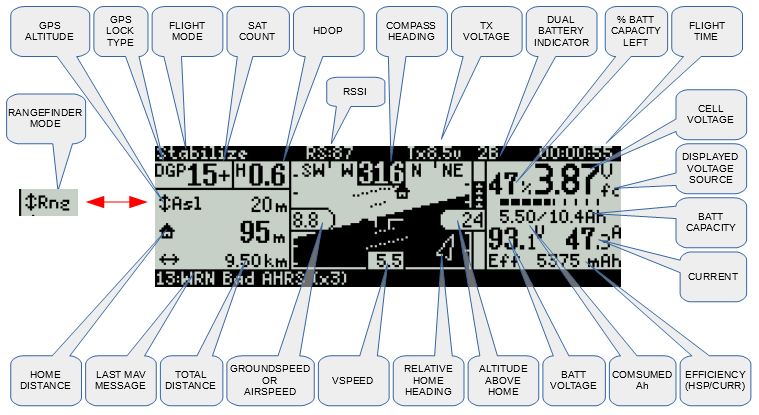
If these values look good and you still cannot arm the plane, look in the Message window (or Tab on MP) to see what the reported issue is from the flight controller.
Hi Greg: wow been busy flying all my drones and practicing the FM on the VTOL and everything almost ready to try FBWA again, also i got the JUMPER T16 Pro Fri evening and been busy learning how to setup this thing i finally got the Yaapu telem script installed on it and now i’m studying how to do that mapping stuff AND the You Tube vid i’m watching and he mentioned You as somebody who tested and figured out how to get it running way to Go and i’ll be going over the Vid several times i’m sure when it gets to hot or windy to fly and if you have any good clear suggestions on setting this up I’m all ears. Thanks B.K
Hi Butch,
It sounds like you are making good progress. I don’t have a Jumper T16 radio but I would imagine the setup is similar to the Horux X10. I would think that Alex has the installation already on his Wiki. I did mine last summer and already forgot the details. However, I think I posted the process in his main thread that I linked to above.
Cheers!
Hi,
We have quadplane like skywalker x8,in Qhover and Qstabilize it’s ok but when change mode to Qloiter, it do transition like fbwa. I want be in vtol mode.
I checked the parameters Q_WVANE_GAIN , Q_VFWD_GAIN but no results. Maybe I didn’t set it right, please guide me.
Thanks.
Sadegh,
Can you post a .BIN log file?
Hi dear Greg,
Honestly, I didn’t fly into Qloiter mode, And I currently don’t have access to the vehicle to send log.
Do you think these two parameters are affected?
Thanks.
At this point, it is just a guess. Try setting Q_VFWD_GAIN to 0 as see if QLOITER mode is now a VTOL mode.
Hi Greg: I finally got the Jumper T16 to have Mapping Functions like the Horus and it only took me 5 days lol i couldn’t get that imagic file to run to process the tiles,but i kept fooling with it and got it to work, so my question is do i have to do this setup for each of my models ? Thanks B.K
Hi Butch,
No, just once. All those files are used commonly by all the models. Only the setup params are unique per each model. For that, you need to run the Radio Setup (SYS key), page over to Scripts, select Scripts, then Yaapu and finally menu.luac.
I can never remember which switches I have assigned for the diagnostic screens and zoom levels so I write it down from another working model first. My .zip file somewhere above had the sound files for changing these screens.
Remember that you can always add maps for another flying area or change the zoom levels to suit your needs. It’s a very powerful feature that tells you what you are flying over because your mind gets tricked on the distance. You are often closer than it looks to the eye.
Cheers!
Hi Greg: Thank you for the info i’ll give that a try,the drone i originally set it up with worked perfectly, and I tried it with another drone but it just said no map data and it said the same thing for the Nim VTOL too, i just received a 4.5 inch fpv monitor so i can see and control my gimbals and i rigged something up to put it on the Jumper T16 Pro , Greg here’s hoping you and the Family stay Virus Free and thanks again for your Help. B.K
Thanks, Butch.
Keep in mind that you need a 3D fix for the map data to be displayed. If that still doesn’t work, try going into the model setting’s telemetry screen and select “Discover sensors” to make sure the GPS sensor has been discovered. Then turn off “Discover sensors”.
Good luck!
Hi Greg: I took the Nim VTOL out for a test while using the Jumper T16 Mapping Tx to try it out, Well when i got a 3D fix i took off in Q-Stab then into Q-Hov and then into Q-Loit and i went into Q-RTL on the way back i received a critical voltage alert at 3.7v when it landed safely and turned itself off my voltage went up to 3.9v so i was going to run the batt down just by hovering but when i armed the plane without touching the controls the plane took off and was uncontrollable nothing seemed to work as i was kinda trying everything i could do in a panic mode until it skidded to a crash thank goodness i put Wheels on the front landing gear or i think that the plane would of dug into the ground and would of damaged it alot more than just cracking the CF front landing gear. I’m asking You to view the log in your spare time maybe you can tell what went wrong i’ll also post a Video if you would like to see it,I’m sure i Messed something up in my Haste to fly. Thanks Greg.Cheers https://drive.google.com/file/d/1pVRvO3nRQtCiivLIywx0AnY4ktrLQPTP/view?usp=sharing
Hey Greg: This is the Videohttps://drive.google.com/file/d/1vkazdXkROuktLkrBREPn9hBmLu8p73Fm/view?usp=sharing