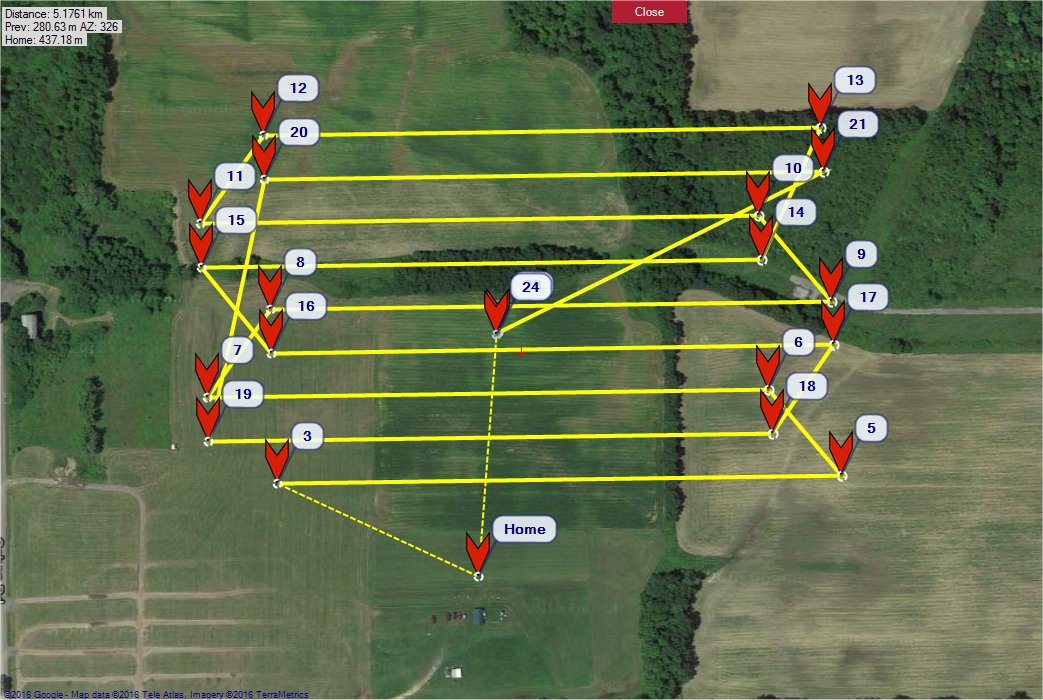
Good advise from rortega. Another technique for dropping altitude can be seen in the bottom most video of my Mapping UAVs Web page. It uses Loiter circles (waypoint 24) to gently glide down to a lower altitude for a transition and copter landing. The images below are from the mapping flight plan in the video. Also note that the rows can be skipped to allow for easier turns by the vehicle. Waypoint 23 is directly behind waypoint 24.


Hi David: Sorry to hear that, i was following your progress and hate to to see a fellow hobbyist give it up and i for one wish you would reconsider and if you don’t here’s wishing you the best in your future interests,Good Luck. B.K
I think that nobody here started flying his Nimbus VTOL with success in the beginnings, at more or less level all of us had frustration episodes, this is one of mine:
One year later, and some months since I bougth the GitUp G3 cammera, I’ve started doing mapping as a hobby:

(The original image has more resolution and quality than this jpg file).
I still have to practice and learn many thing to go ahead…
The FPV hobbist must have a predisposition for learning, not only with the aim of acquiring technical skills, but also an attitude directed towards the acquisition of certain emotional skills, such as resilience. Only then will he be able to overcome frustration and enjoy watching his creations flying.
2 Likes
If I was building a Nimbus from a kit or from scratch, the “predisposition for learning and acquiring technical skills” would be part of the process. But, I paid for a plane that was advertised as “Ready to Fly”, and it has been anything but. I’ll exercise better “emotional skills” when a product performs as advertised. For the money I paid for this thing, there should be minimal, if any, frustration to overcome. The fact that an expensive aircraft can be grounded or crashed because of the unreliability of a $12 servo takes all of the enjoyment out of this hobby for me. I don’t need each flight to be a roll of the dice, with the odds heavily in favor of another crash. All the technical skills in the world won’t help you if someone sells you unreliable junk.
But, thanks for your input anyway. You guys take care.
1 Like
You are absolutely right. Unfortunately, these days, profits come before responsibilities. It shows in every industry, in every level. Even in the climate talks in Madrid…
You spend a lot of your hard saved money and just because they can make a few pennies more by putting in rubbish servos, all your fun and passion is gone. It’s really a shame.
Speaking of cameras, I had to use my old S100 camera for some SAR missions, here is the cradle I made for it (use the previously posted landing gear plate to mount this to with standoffs).
S100 Internal Cradle v5.STL (413.4 KB)
1 Like
I would like to share with you how I solved the problems I had with the nose connector:
- Servo issues in the fpv camera pan & tilt system.
- Airspeed issues.
I designed this system on september and I’ve have tested it in my latest 3 flights. When I saw the design of the panel of Chad_Frazer a few days ago, I thought, Oops, it was ahead of me! 

I have uploaded to thingiverse just now, I think this would be help somebody else to solve many problems.
2 Likes
Nice Rortega!
Got a part number for those connectors??
1 Like
They are MPX 6 pin connectors. The link where I bought them are no longer available.
https://www.aliexpress.com/wholesale?SearchText=mpx+6+pin+connector
To Greg,Chad,and everyone Who follows and comments in this Nimbus VTOL thread So I’m Wishing everyone A Merry Christmas and a Happy New Year and after my first attempt at converting the Nimbus kit to be a VTOL and it ended badly with a fatal crash in mid Nov so i’m sure theirs a big box near my tree that Mrs Clause said to if you first don’t succeed Try again so i’m going to give this another try so all of you have a great Holiday Season and enjoy your Family and Friends. B.K
3 Likes
Today I made the last flight of the year with my Nimbus, and captured some pictures with the GitUp G3, this time with best results. Enjoy it!
Merry Christmas and Happy New Yeaar mates!
1 Like
Very nice! Thanks for sharing. Did you use Mission Planner to design the plan or another application? Can you post the mission? I am curious to see your Nimbus banking or turning radius.
Cheers and Happy New Year!
I used Mission Planner. I have on board video from the fpv camera with OSD data, and logs. I’ll share it asap.
1 Like
FYI - There is some interesting reading for FoxTech Nimbus owners in the thread below. At this point, they are still in the discovery phase.
1 Like
Hello Greg: I hope you and the family enjoyed the Holidays and now your building something and staying warm,well i ordered another MFD Nimbus Plane opened it up on Christmas morning only to find out they sent me the VTOL Kit not the Plane Kit that was supposed to come with Motors etc, I’ve sent them emails everyday but have not gotten any response so i guess i’m stuck with it and now trying to get motors that fit since my first motors do nothing but chatter since my crash in Nov and the wiring inside the nimbus is not the same and the previous set of wings do not work pnp and the new wings are wired different so far i’m starting from scratch again and so far i’m putting 2 ubec’s 3a 5v in Aux 3 for the tilt servos and one on chan 3 for the wing and vtail servo’s i tried 5-6 amp 5-6 volt ubec’s but they would not work on the pixhawk? it’s like it killed the power to the pixhawk IDK? any suggestions or idea’s Thanks
Hi Butch,
Thanks for the warm wishes! We have both sunshine and snow squalls today so it’s a good day to stay inside and build.
I am not familiar with what FoxTech has to offer for Nimbus kits. They seem to have reduced their offerings since I last looked. Try sending a forum message to Jack at “foxtech” or or contact support1@foxtechfpv.com and see if you get a reply.
You can still get a Nimbus or Nimbus VTOL directly from MyFlyDream.
I would start by getting the tail servos to work on the fuselage and leave off the wings. Make sure that you have a BEC plugged into a spare AUX channel to power the servos. You may also need to activate the safety button depending upon your setup.
Good luck!
Hi Greg: thanks but i purchased the kit from My Fly Dream they are the company i can’t get a hold of to try to at least send me the missing motors, but on another note what kind of bec do you use if any? Thanks B.K
Butch,
For the Pixhawk 1 rail power (MAIN and AUX), I use a 5v BEC with a 5.7v zener diode for backup power if the Power Module fails. I use these $5 Turnigy 5A (8-26v) SBECs that can jumper between 5v and 6v. So the Pixhawk 1 rail gets 5v and the wing SBECs are set to 6v.
Cheers!
Hi Greg: Thank You, I have these exact Turnigy 3a- 5v Ubec and The Turnigy 8to26v input and5a 5-6v SBEC output, also i made a few Zener diodes and 3 rec 5.7 diodes i got from HK for Rx brown outs so where and how do you install these do you just put them in a empty aux slot and the other in a empty slot 3 or 7 Main out put or does it matter? and where do you place the diode? on the aux side or main side? Thanks B.K