Oh man! Thanks for the correction, Rolf. 
We’re saying the same thing. What you have for rudder control is correct.
Your plane is probably not sitting level or you need to calibrate the Accelerometers in Mission Planner. In FBWA mode, the flight controller will correct for pitch and roll.
I use Beacon Foam-Tac.
Our Halloween night was creepy, cold, and wet, with occasional wind gusts over 50 mph. Wish I was in Florida today! ![]()
Greg: Thank You: Sorry about the crappy weather, i followed the wiki they all move as described both by hand and by Tx controls in FBWA ,while i’m in FBWA and sitting still l-ail is up 10 deg and the r-ail is down 10,the v-tail LVtail is right(IMO up) 4/5 deg and the RVtail is left or up 20 deg then when i put the plane in reverse order From FBW to Qhover to Q stab nothing changes until i’m in Manual mode then then all the flaps are perfectly flat with the surfaces? i placed a Level on the floor and it’s level so where do you put a level on the plane to check it for N S E W and i Ordered the Foam Tac glue.Thanks again.Butch
Guys we have a conclusion with our problem. Our Failsafe is set to no pulse. Everytime a signal is detected. These RC inputs or spikes appear. We have watch the TLOG and Live Graph of the RC inputs. I really dont know what causes these spikes. Before we dont have these issue.
Michael_De_Leon
If you want to extend the range of your hand held transmitter let me know and I’ll share my experiences with that kind of project. Mine can reach out to 3.05mi confirmed.
Thanks for this. We were able to reach 5km with the stock taranis x9d and 8xr and now were flying more than this. We did not expect glitch from inputs will happen. Our solution is turn off radio when its already more the 5km range. Its the glitch we wanted to know why it happen. We tried replacting the glitch but did not happen. By turning off and on the radio during mission. So far we have a work around.
I will be glad to know what you did to reach that far.
Thanks @Chad_Frazer
BTW guys we are using the Air End telemetry radio for the Mavlink from foxtech. This unit is huge and with 7km out we still have 90%signal. Havent tried the fpv feed for this. Will try it soon.
All,
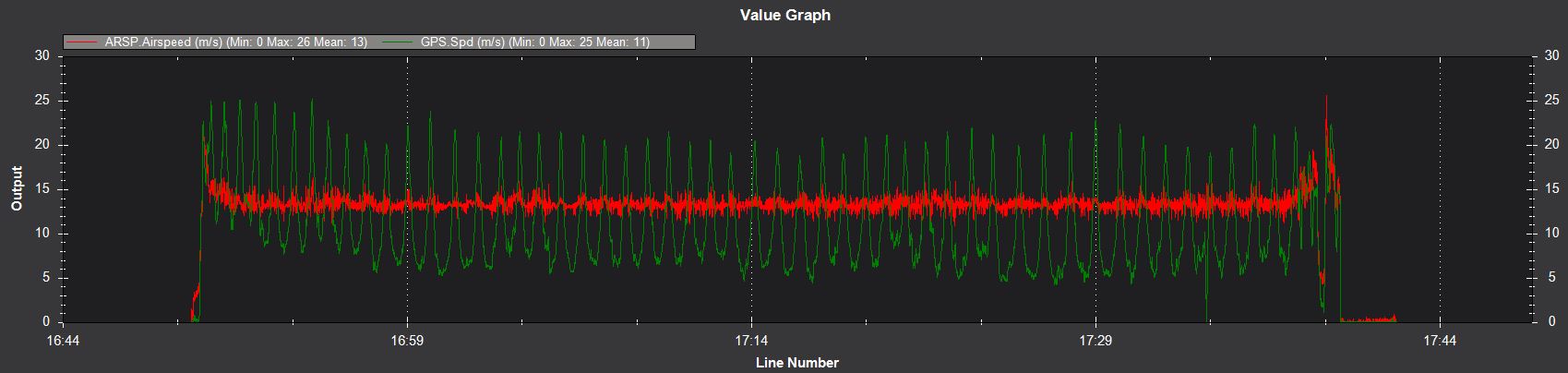
I completed my first endurance testing with my SAR configured Nimbus 1800. I am posting the results below along with some problems that are being stubborn.
Temp: 54degF
Winds at 300ft 14-17mph
Mission altitude: 300ft
VTOL to 75ft then transition
Aircraft Empty weight: 7.51lbs
Battery weight: 2.65lbs
Battery rating: LiHV, 10,000maH, initial charge voltage 26.1V, 10C discharge
Max Battery draw was 88A (spike only), average over the mission was 8 amps
From takeoff to touchdown (manual landing due to failsafe (pucker factor 8)) flight time was 49minutes, 59seconds.
Power charged back to the flight battery was 7731 mA
For some reason I am getting a Bad Input File error and therefore cannot post the auto analysis results so the best I can do is link the .BIN file for anyone that wants more data.
Here is my latest PARAM file:
And my mission file:
And of course, my .tlog file:
@Greg I turned on the automatic airspeed calibration and I went from 1.9366 ratio to 2.90876 so yes, your right, at least one calibration is required. I noticed during the calibration that there was a difference of about 3mph as the bird calibrated (29-34mph range is where I noticed this).
If anyone can run an auto analysis please post!
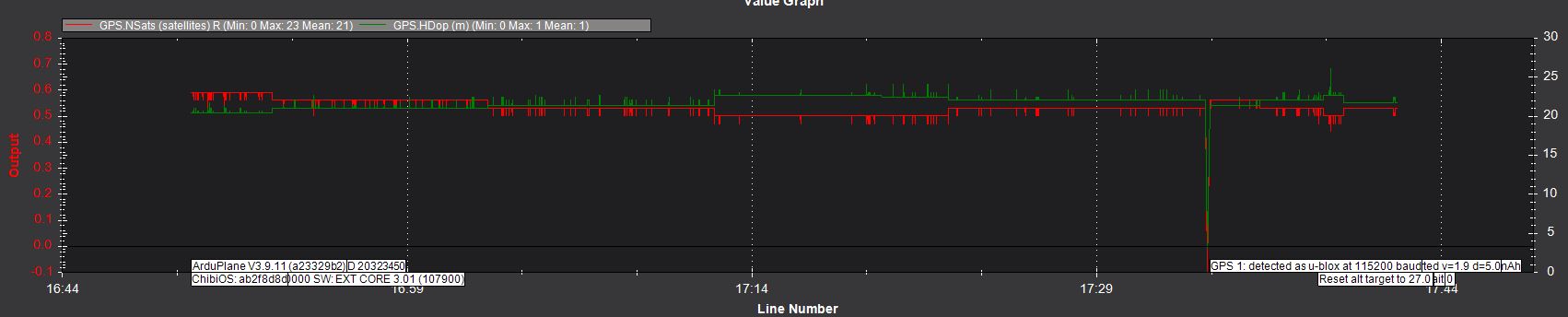
GPS glitch during endurance test:
- I have been having problems with the LED’s on the HERE 2 module not lighting up sometimes. In the past I thought it was related to the only module I had hooked up to the I2C path which is the SDP3x airspeed module or the wires that run to it. I’m not sure of that anymore.
- In the past if I disconnected the airspeed module the lights would go back on and IF the GPS module was not working then it too would start working properly.
- I then potted the connection to the airspeed module to freeze the wires, the problem is still occurring intermittently.
- I can’t reproduce or solve the problem reliably.
- GPS still works when the lights are out, SOMETIMES.
My new concern is that whatever this problem is it might of caused the GPS module to drop out (power problem?). Notice the dropout on the far right.
I’m stumped:
To extend the range of a regular Futaba transmitter I bought a 1W 2.4ghz amplifier that is normally meant for your home router. Install can be tricky and I have destroyed a 500 dollar new transmitter attempting this. As for Taranis series do NOT attempt to boost its 2.4Ghz signal as they made that transmitter series with a soldered connection instead of a U.Fl connector as most other transmitter manufacturers do. That makes the install highly likely to fail because a human being must have both skill and experience to pull it off, I lacked enough of both to make it work. That was a $275 mistake.
Another tip: If you use the RFD900 telemetry module it will INTERFERE severely with the 900Mhz long range upgrade module that you can get for the Taranis series. I’m not kidding, it will drop the signal from 100% down to 20%. This happens despite frequency hopping.
Maybe you just set the Failsafe on the X8R wrong.
With the Taranis and OpenTX, you do not need to press a button on the X8R. Select on the Taranis no pulse. NoPulse as a failsafe mode is automatically transferred to the receiver. Enable Throttle FS in Arduplane and test failsafe with Missionplanner via USB connection (without battery).
Thank you for the tip. I have one of those modem 2w booster. We have been using ezuhf and dragonlink before. So far we are enjoying the stock Taranis now. I mean that is lighter and no moxon antenna.
We were really worried about the spikes. Maybe just a bad set up.
Thank you on this. Seems you are correct. We tested this morning and follow the no pulse set up with out pushing the FS button on rx. Tested out 4 flights today and it did not show any sign of glitch or spikes.
Have you tried GPS port 2?
Lots of action here. I am envious that some folks can still fly in November. ![]()
Chad,
I looked at your log and it sure seems like the GPS module reset itself as an isolated event. At first I thought that you had some interference but I would simply replace the GPS unit.
Butch,
Use the carbon tail boom and across the wings for your level setting. It only needs to be level on the first part of the 3-axis calibration in Mission Planner. After that, I simply hold it by hand in the other positions. An exact perfect level is not needed as the plane will correct itself in both hover and forward flight modes. Make sure that SERVO_AUTO_TRIM is set to 1.
When the plane has been calibrated for level (reboot the FC) and you are in FBWA mode, it’s a good time to set the SERVOx_TRIM settings so that your ailerons and tail are all neutral.
This happened to us but in with different part of the system. The rfd900 was having connection problem and we cant connect with the mp, i played around the pins and to find out it was loose once we move it a little. Secured it and was okay.
Good Morning Greg:Well after Reading ,doing and checking and changing stuff you have suggested, At 7am i took the plane over to the field hardly any wind My Nimbus Flew!!! in Q_Stab mode Wahoo i only needed some stick adjustments to get it up and hover it about 6/8 ft off the ground then i’d land it and take off hover and land again i did this 3 times without crashing it Lol taking a break in between due to my excitement but when the wind started the moss on the tree waving i ended the Test,I down loaded data flash logs of the test and tried to get a Auto analysis but it just says not available when used as a windows store app wtheck does that mean?So i’m asking you would you mind taking a look at my log file and let me know what you would do,tweek,change etc: THANK YOU GREG I couldn’t of done this without your Help and Guidance along with this group and their questions and comments.Thanks again.B.K
1 Like
Congratulations, Butch! That first hover on a larger VTOL like this really feels good.
I’ve never used the Auto Analysis feature so maybe someone else can help here.
You can always post your .BIN file here. You’ll need a host for the file and then post the link here. A video would also be nice. I would recommend more hover testing until you are comfortable with it since that will be your emergency go to mode when flying. Be sure to test all three hover modes; QSTABILZE, QHOVER, and QLOITER as the later two modes also test sensors like BARO and GPS.
Cheers!
Although it is more expensive than a DIY solution, MFD now has a Tilt Rotor Assembly for the Nimbus. The assembly includes a mount for the rear motor.


1 Like