This conversation chain has been a great help for me in developing my Nimbus VTOL! Really good discussions…
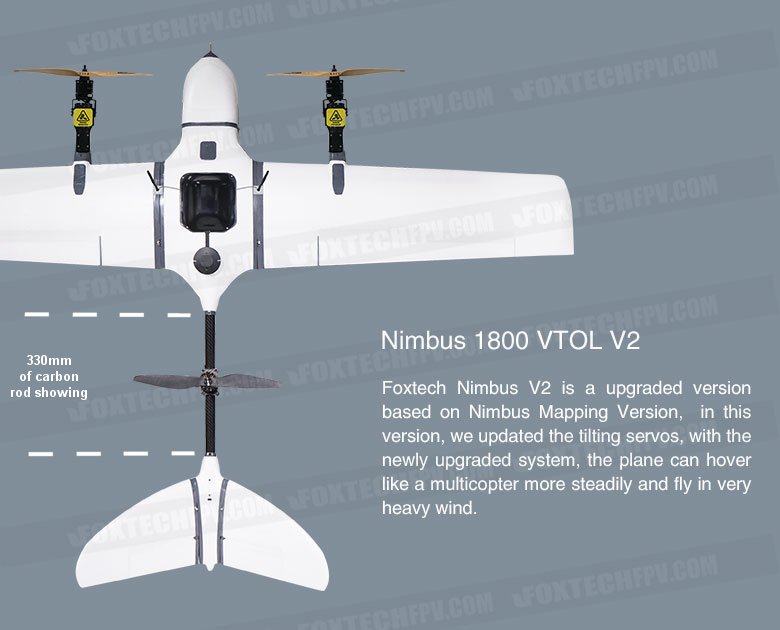
I was flying my Nimbus recently and broke the tail boom sadly…
Can someone give me the exact length of the tail boom that I need ( between the mounting hole at the fuselage and the empennage)
I Switch E is a two position switch
Switch G is a three position switch
If Switch E is in the up position then Switch G is QLoiter, FBWA, RTL(plane circles the Launch Point)
If Switch E is in the down position then Switch G is QRTL, QRTL, QRTL
In this configuration, if the aircraft is in flight then putting Switch E in the down position will cause the bird to stop what it’s doing, transition to forward flight, get close and then land as a multirotor. If the bird is on the ground and wont disarm then the QRTL will see that its altitude is below 10m (barring extreme barometer drift) then flow into a QLand mode which will detect a zero throttle and/or a no decent rate and it should disarm.
This configuration is now my main one and works as described.
Hi Greg: well this morning i tried Q_Stab and every time it started to lift off it just starts Yawing to the right pretty fast,so sat it down and the torque ripped off the front landing legs and the bottom Camera, any suggestions would be helpful Please and Thank You. BK
My first suggestion is to not use a camera on your initial test flights. Use a dummy weight instead.
I would make sure that the compass is calibrated and verify that your directions (N, S, E, W) all show up properly in Mission Planner. Perhaps your Compass Rotation setting is incorrect for the installation.
Props are on in the correct position (motor numbers) AND that they are not put on upside down.
Re-calibrate your radio (transmitter itself if it can do so as well as through mission planner) and also check that the manual trims on your transmitter have not been bumped.
Look for anything ferrous on your bird, an iron source (even steel) will make your compass inaccurate. Magnets are a huge NO NO
Look for loose connections to your motors
Manually rotate your motors and listen for clicks that might be an unseated magnet within the bell of the motor
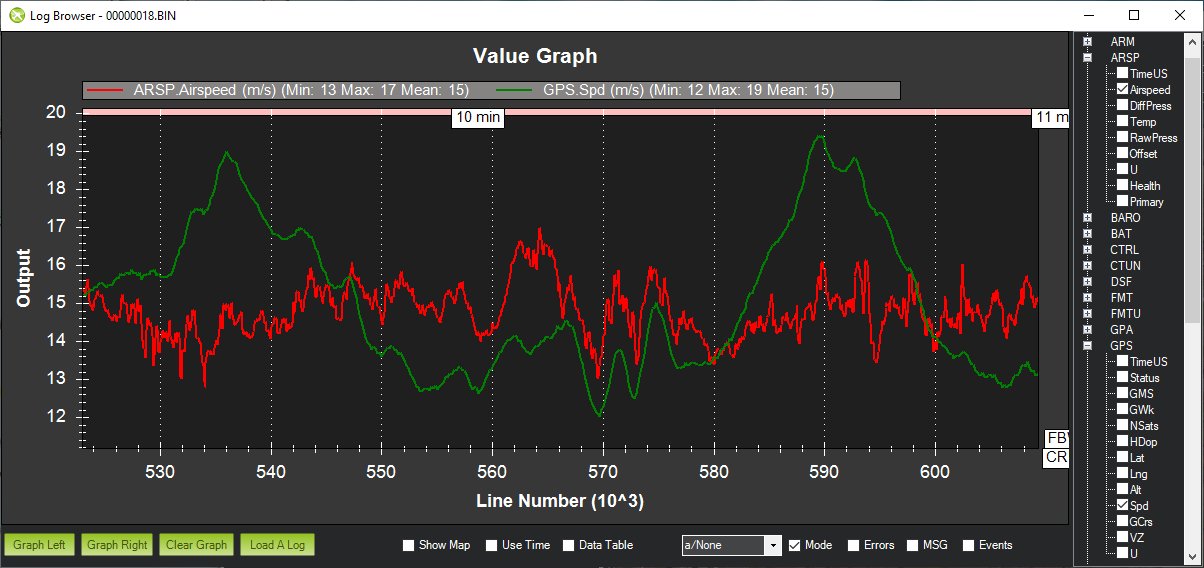
Maximum deviation between what GPS says and the SDP3x says is about 7 m/s (which is significant). I think you are correct Greg, in that it does need an initial calibration.
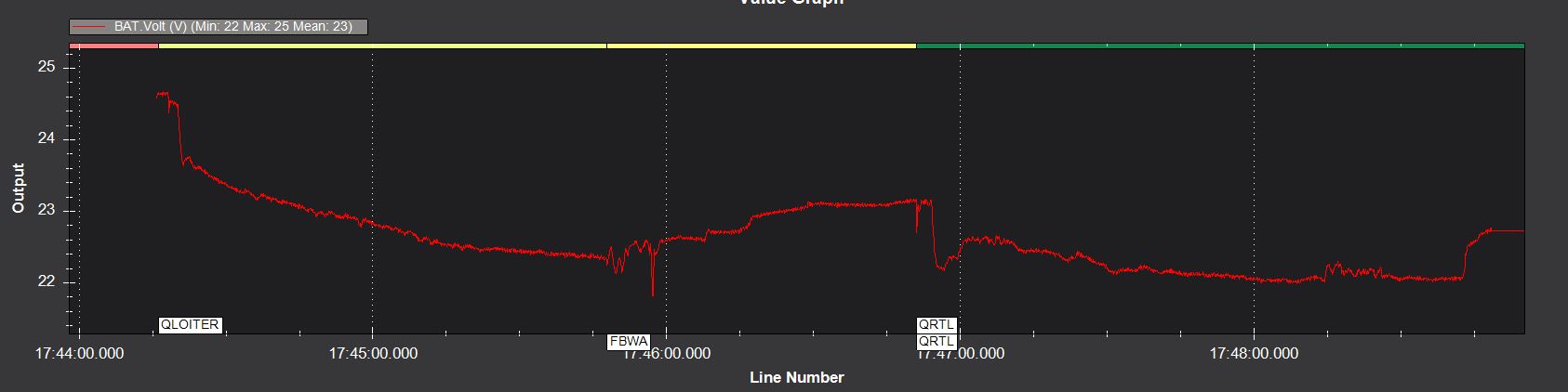
Battery Use, it was NOT a fresh battery (8amp, 10C, 6S):
The auto analysis likes everything but the compass, yet the bird did just fine:
Log File C:\Users\thear\AppData\Local\Temp\tmp8530.tmp.log
Size (kb) 117581.3662109375
No of lines 1128418
Duration 0:20:40
Vehicletype ArduPlane
Firmware Version V3.9.11
Firmware Hash a23329b2
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Brownout = GOOD -
Test: Compass = FAIL - WARN: Large compass offset params (X:-43.85, Y:-135.90, Z:312.92)
WARN: Large compass offset in MAG data (X:-43.00, Y:-135.00, Z:312.00)
Large change in mag_field (57.37%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.27, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = NA -
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = UNKNOWN - No CURR log data
The magnetic disturbances seem to be related to VTOL mode, I’m not sure how to stop it.
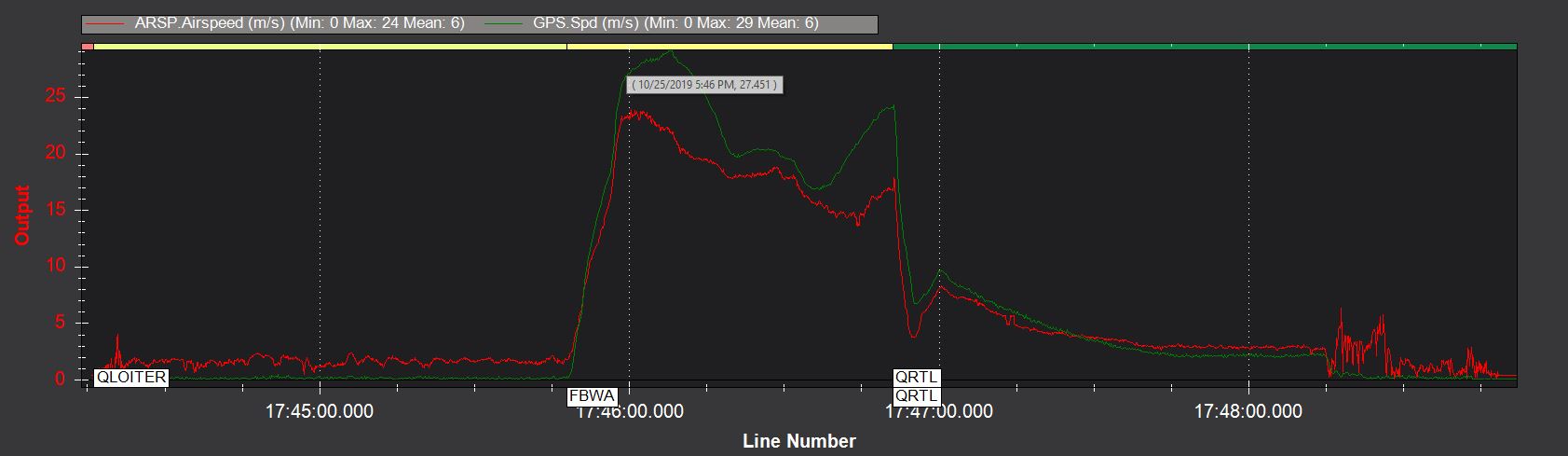
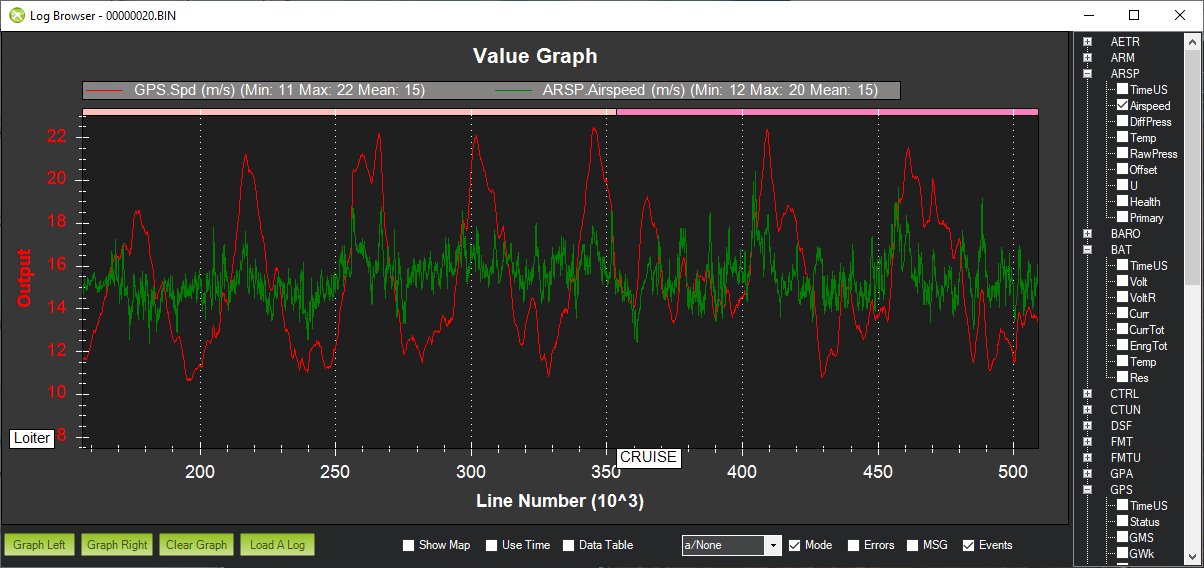
Congratulations, Chad! The initial transition is always exciting. On your statement above, it is really GPS ground speed, not airspeed like the SDP3x sensor. So you will see a difference as the flight controller can now compensate for wind changes. Try flying in Loiter mode for a few minutes and graph that log. The effective airspeed of the plane is now steady as it includes the wind.
Hello. First of all I want to say thanks to all forum users and especially GregCovey. thanks to your efforts, and I started this project.
Like everything turns out, I already flew in quadrocopter mode, everything is not bad. but there is a problem that I can’t solve. If I configure that the control works as it should in quadrocopter mode, then in airplane mode the rudder works the other way around. I deflect the stick to the right, and the tail surfaces deviate to the left. I tried to invert both the signal from the radio and the tail servo, but then something else starts to be controlled incorrectly, for example, the elevator in airplane mode, or back and forth in quadrocopter mode. where do your tail wheels deviate in airplane mode if you pull the left stick to the left?
Welcome to the Nimbus VTOL thread! It sure has been a great APM community effort!.
It can be tricky to get the v-tail settings correct. I would start by looking at the Radio Calibration screen in Mission Planner and verify that when you move the rudder stick left that the bar goes from center to the left. Also, check your settings against my .param file below. Perhaps you have the SERVOn_FUNCTION definition reversed for left V-tail and right V-tail.
My guess would be, do you have left Vtail and right Vtail servos plugged in to the correct ports? If they were to be swapped with each other, you get a situation where either the rudder or the elevator is wrong no matter what you do.
If your pitch and/or yaw are backwards in tricopter mode, but the plane remains stable - not spinning out or wildly pitching - then your RC inputs are reversed. So fix that first.
Once you can hover normally, then diagnose your tail controls. If both rudder and elevator are backwards, then reverse the servos in your arduplane parameters. If rudder OR elevator is backwards, but not both, definitely check the wiring to make sure that the plugs haven’t been accidentally swapped.
Thank. I think the Vtail servo outputs are not mixed up, as with the settings like that of GregCover, the tail works correctly, but then in quadrocopter mode, if the right handle on the remote control is forward, the plane flies backward. The head is already exploding. Either in quadrocopter mode it does not work correctly, or in airplane mode. In quadrocopter mode, the right knob up on the remote control should fly forward, right?
I lift the right handle with the GregCovey settings in quadrocopter mode, and the plane flies backwards, and vice versa.
Sorry for the language, this is Google translator (
Thanks a lot!!! I am sure that I did not confuse the servo outputs, but maybe the wrong stickers were on the servo outputs of the tail. As a result, I swapped the tail servo outputs and it worked as it should. Thanks again!
Yes, that is correct. Also make sure that in the Mission Planner Radio Calibration screen that the bar graph moves up when the stick moves up. Make sure that you follow the Wiki description below. My guess is that you have a reversal somewhere. Try swapping the v-tail servo cables at the Pixhawk or in the SERVOx_FUNCTION definitions for 79 and 80.
Hi Greg,Chad Everyone: well Fri i tried to Q_Stab and every time i try to lift it up it yaws Right so i gave it a little more lift off the ground and and it spins right pretty fast i set it down while spinning and broke the front Landing gear, well i quit and went home and fixed the LG let it dry and re calibrated everything, I went out on sat and after several attempts i still can’t stop it from spinning (Yawing) to the right so i went back once again Calibrated everything again both on the Tx and MP so i went back out on Sun several attempts again still yaws right so last attempt i put it in Q_Hover and throttled up to 4 Feet still spinning fast to the right once again i set it down and snapped off the the rear LG stick so went home took off the props and all day just watched how the plane responds to the Sticks on Tx,Since i have never had a VTOL I’m kinda puzzled when i plug in the Batt and arm the Plane is in Q_Stab Mode nothing seems to move until i start the motors is this correct?and then only the tilt motors move slightly like maybe 5 deg each way left motor goes forward and the right motor moves back and i have no movement for the Ail Or V-Tail IDK i’ve tried to goggle and You Tube to find out information on what the VTOL does When you do this or that with the Tx Sticks IDK i must have something Messed up somewhere i think so i’m open for any and all suggestions and i thank you all.BK
Good Morning All&Edward Since this is my first VTOL Build and before testing it i have it plugged in to MP and have 12 Sats then i walk it to the field 100 yards away put it together and fire it up and wait 5 min then test Q_Stab so i’m assuming everything is ok and when i’m flying one of my Drones in manual mode then switch to hover mode if it starts toilet bowling then i know my compass don’t have enough Sats but this VTOL comes straight up off the ground spinning to the right like i have my thumb pushing the stick to the right and nothing i try to do changes it except to shut it off and let it fall, but thanks for the suggestion.BK
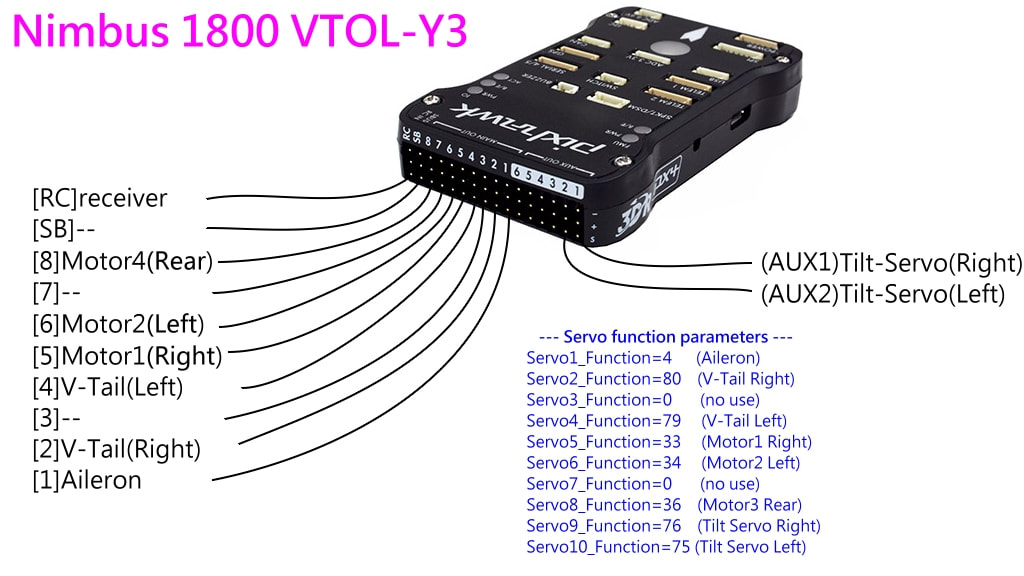
In the Nimbus VTOL, it is the tilt-rotors that provide yaw control during quadcopter modes, not the v-tail. My best guess is that your SERVOn_FUNCTION for left tilt and right tilt are misconfigured and the flight controller is trying to hold yaw in the wrong direction. You may also have the SERVOn_REVERSED parameter backwards, meaning that you’ll need to swap your MAX and MIN settings for up and down. This will reverse the flight controller’s direction of yaw correction.
One easy thing to try is simply swap the servo connections for left tilt and right tilt rotors going into the Pixhawk. This can also be done by changing SERVO9_FUNCTION and SERVO10_FUNCTION from 75 to 76 or visa-versa. If that doesn’t work, then I would follow the Wiki tilt reversal directions below.
Lastly, when all else fails, try to match up the physical servo connections to the servo functions in the diagram below, as well as your configuration in Mission Planner, and, maybe you will see the issue.
Good luck!
Tilt Reversal and Range
You will need to set the SERVOn_REVERSED parameter on your tilt servos according to the direction of your servos. You should adjust so that in MANUAL mode the rotors are tilted forward and in QSTABILIZE mode they point straight up.
You will probably also need to adjust the SERVOn_MIN an SERVOn_MAX values to adjust the range of movement and the exact angle of each servo for forward flight and hover.