Man, that transmitter Greg, is looking better and better every time I see it.
I did a very thorough 1 axis accel calibration for my bird (using leveling bubbles on top of the autopilot) and then re-calibrated my transmitter and between those two things my bird hovers in place like a champ!
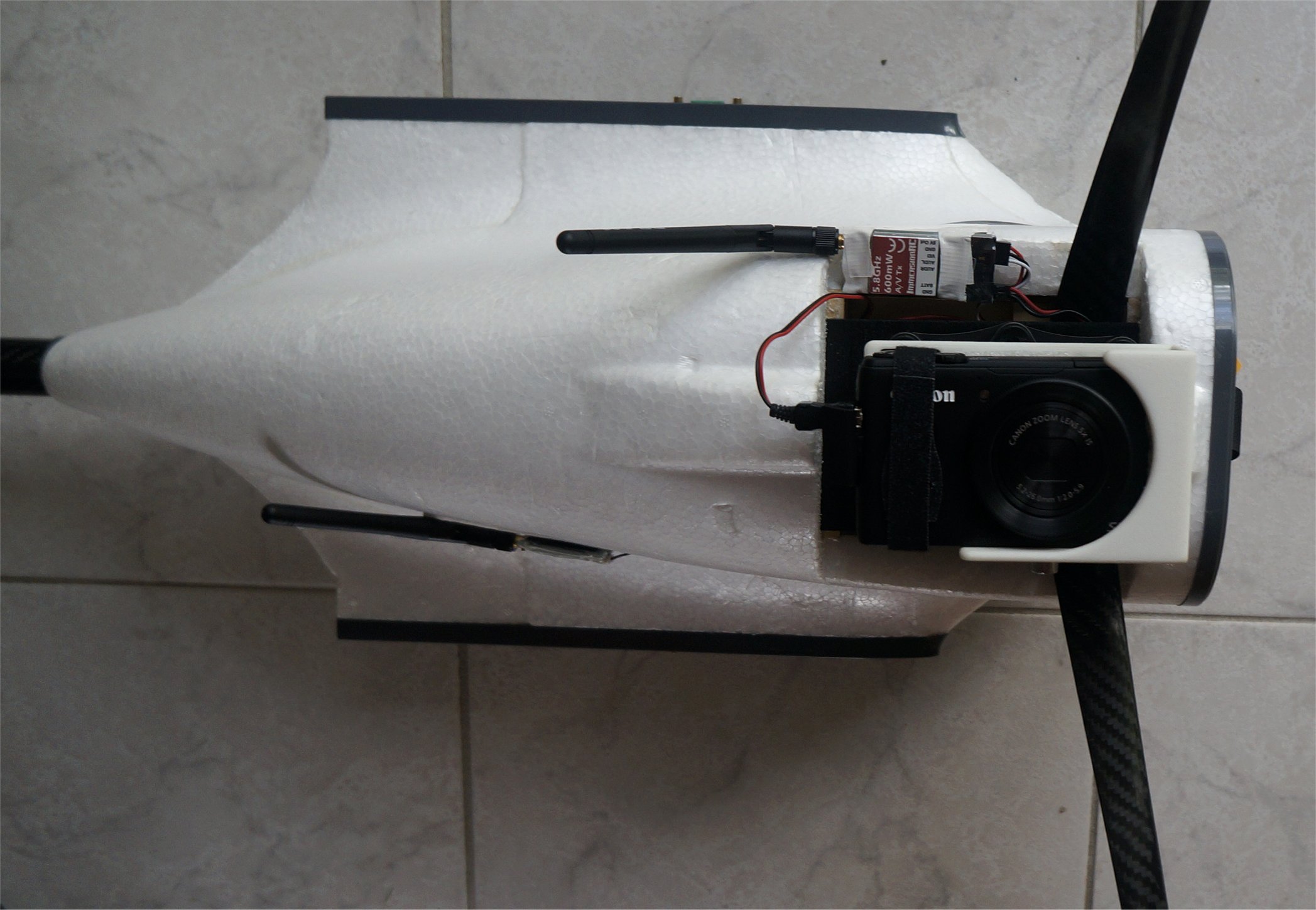
I used the cannon S100 for a LONG time! Very good starter camera, I loved mine to pieces! I have now switched to the MAP-02 and will be working on the attachment after I get transition testing completed.
She is weighing in at 7.51 pounds without battery and without payload. The battery I am testing with is an 8000maH 10C 6S.
She has a carbon fiber 17x4.5 prop from foxtech on the rear and I am using a 13x8E APC brand pusher/tractor props for the forward motors.
AND, in celebration of the Cannon S100, here are my models for mounting them:
S100 Underslung Craddle v2.STL (504.7 KB) This one uses two 1/4in wooden dowels glued into the foam wing as hardpoints for attachments. Use a servo rod (thin one) to lock it in place after you have glued in the dowels and match drilled the rod holes in the model with the wooden hardpoint dowels.
S100 Internal Cradle v3.STL (421.8 KB) I used this one with the Buffalo FX79 but I’m sure it will work for a lot more airframes.
Phantom Cradle.STL (419.9 KB) Internal Phantom FX flying wing mount.
Cannon Powershot S100.STL (74.9 KB) This model is accurate enough to use to make your own S100 mounts with.
Questions:
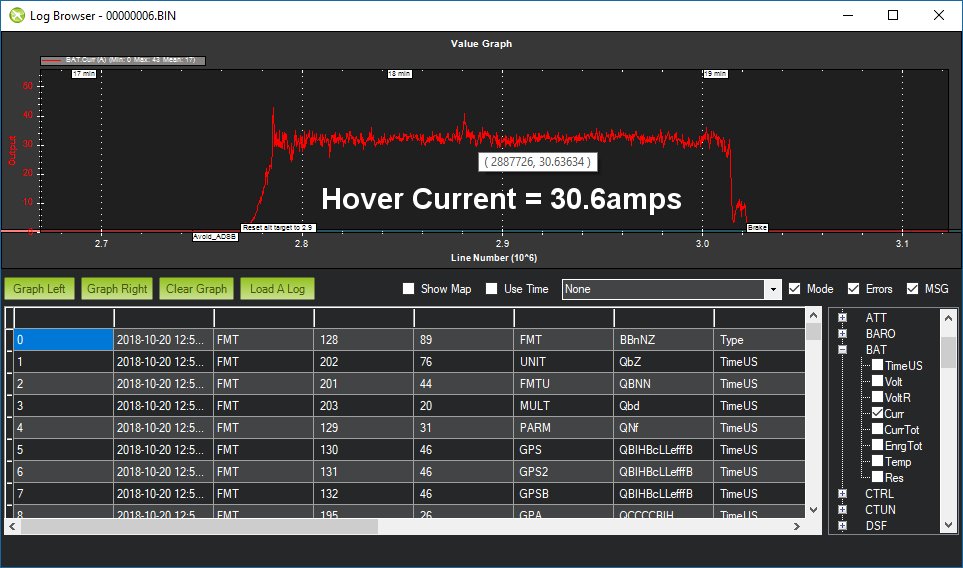
My bird wants to hover around 30-32 amps with a 2.09lb battery, does this agree with other’s hover power consumption?
I am guessing that forward flight will be around 13±2amps when in cruise mode, is that a good guess?
I am also unable to disarm after I have hovered in QLoiter mode, the motors keep spinning at the armed and throttle at zero speed (5% throttle I believe). I have to use the GCS to disarm. I expected it to auto disarm upon detecting a landing. Any ideas?