I have a vectored yaw aircraft (Nimbus 1800 VTOL) detailed here around page 611.
She hovers fine and all instruments/behavior is as expected.
My next project with her is to install a TFmini Plus from Benewake but I am having trouble getting her to work.
Problem: I cannot get Pixhawk 2.1 to show any rangefinding data.
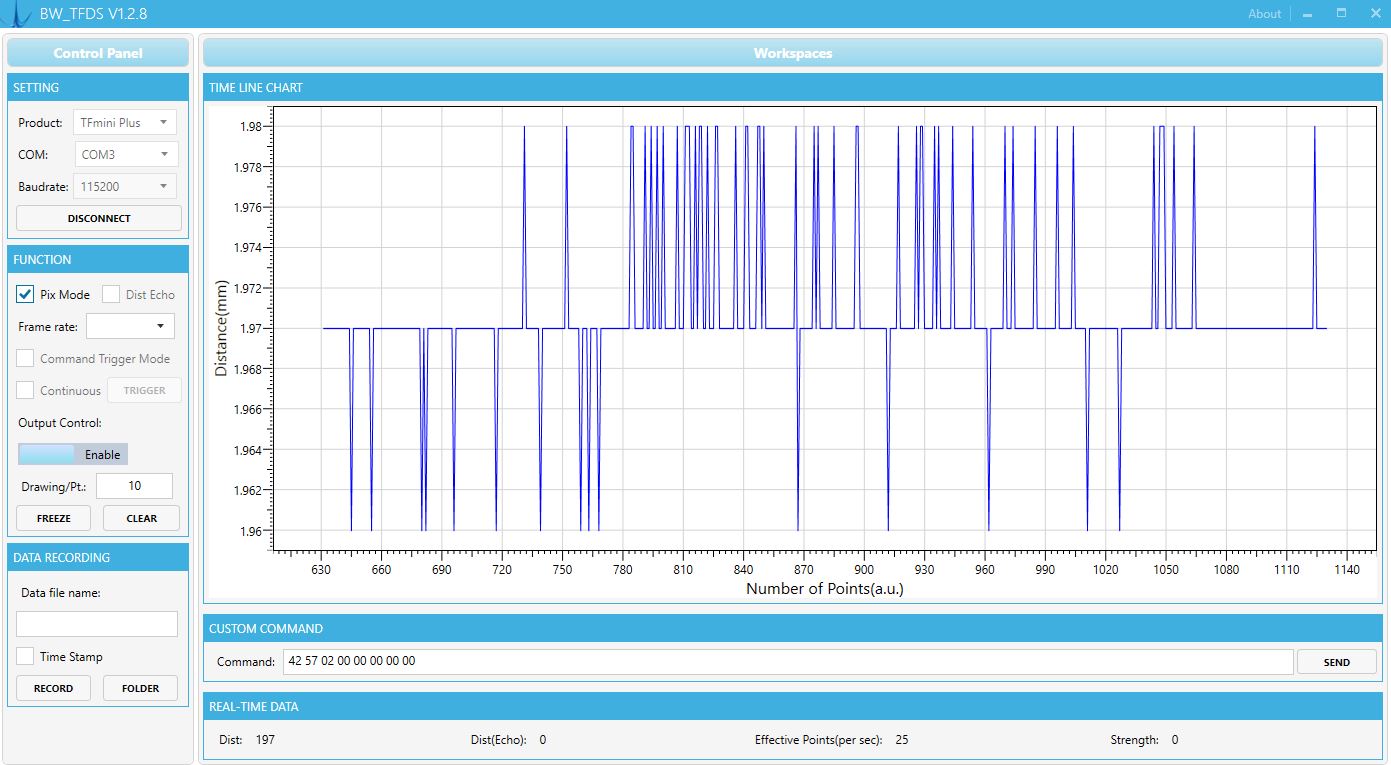
Fact 1 - The TFmini Plus works with a TTL-USB converter that is plugged into my PC and I am able to do everything with the provided Benewake software except send/receive commands. Product manual is here.
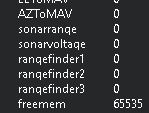
Fact 2 - When I hook it up to my Cube Black (Pixhawk 2.1) by way of a home made adapter cable that is inserted into the GPS2 port, I can see that it is getting power via the reddish light it emits and because it is getting warm. Yet I do not get distance reports as shown below (I have already tried to swap the Rx and Tx connections, both give the same results shown below)
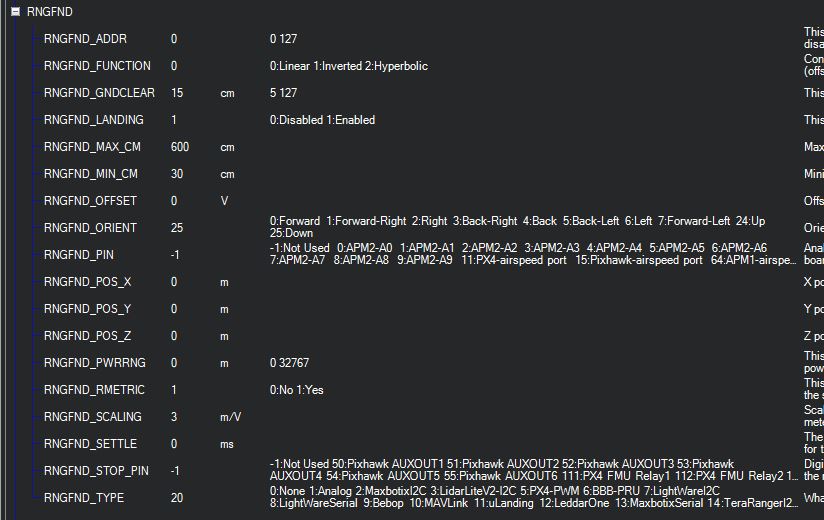
Fact 3 - Here are my settings as I have gleamed from multiple sources such as this one:
Fact 6 - I found a developer thread that as of Sept 2019 that support for the TFmini Plus has not yet arrived and yet here it seems to have been figured out.
Yes, if you use RNGFND_TYPE = 20 you should use the standard mode.
Maybe I missunderstood your connections, but use a 5V bec to feed the rangefinder. Do not use the GPS2 power supply.
Hello, I am tagging on to this tread as it seems like I have similar problems…
I have installed a TFmini Plus to a EDU450/Cube Orange.
Have connected it as suggested here and power the LiDAR via a ESC that take the power from the battery. (Soldered to the battery +/- on the PDB.)
Do get a “PreArm: RangeFinder1 Not detected” message that disapear when I force Arm it. But no reading on the Status>SonarRange.
Lidar is connected to the Telem2 serialport.
Used the following parameters
Serial4_Protocol = 9
Serial4_Baud = 115
RNGFND1_Type = 20
Serial2_Protocol = 9
Serial2_Baud = 115
One thing: I suspect the Serial4 parameters may not be required??
I feel your pain, as a matter of fact I just installed one myself from the default firmware settings for ArduPlane. I’m posting my parameters file here. Open it up, then ope up mission planner and connect it to your bird. Go to the parameter tree and under Rangefinder start at the top parameter listed and go straight down and compare it to my parameters. I’ll bet it works then!
The correct port is indeed Telem2, mine is working while plugged in there right now.
Chad, the paramfile you sent went straight in and the LIDAR works now fine. However, one concern… this is for a different model… do I have to go through all settings to fly the quad again or will the Cube sort that out?
Everything seems to be correct (drone seems to respond to radio inputs etc…)
Chad,
Yes, did realize the mistake there… but could not resist: It actually flew well. One strange thing is that it give very high readings on the Sonarrange and the Rangefinder. Any idea why this come from?
I think the only reason that it flew was because my aircraft was a VTOL and therefore the quad copter settings were somehow appropriate. You lucked out like no one I’ve ever seen before, find fixed wing firmware on a multi rotor air frame is just about unheard of. As far as the reporting goes that could be the settings that you have for reporting what kind of units you are using imperial versus metric. There are also two or four settings that control the minimum and maximum range as well as what to consider to be landed for your particular platform. Check those settings they will be in the rangefinder section like first half of them I believe. You have to realize that even with identical airframes with identical components the values for parameters will not be the same between those two aircraft. Every drone has its own unique parameters. Reinstall your multi router firmware as they’re very easily could be situation’s and which my firmware and your quad copter airframe will return unpredictable results and you will wind up throwing your aircraft in the trash.
No worries, was aware of the “danger”… and only hovered it No real danger. However, been investigating a little and I think that what I did was actually to import only the changes - so that mean that all my orignal settings (flight controls where still loaded) but all your other values go loaded - thus sorting out the LIDAR issue…
Have reverted back to the original parameters now now the LIDAR dont work anymore…
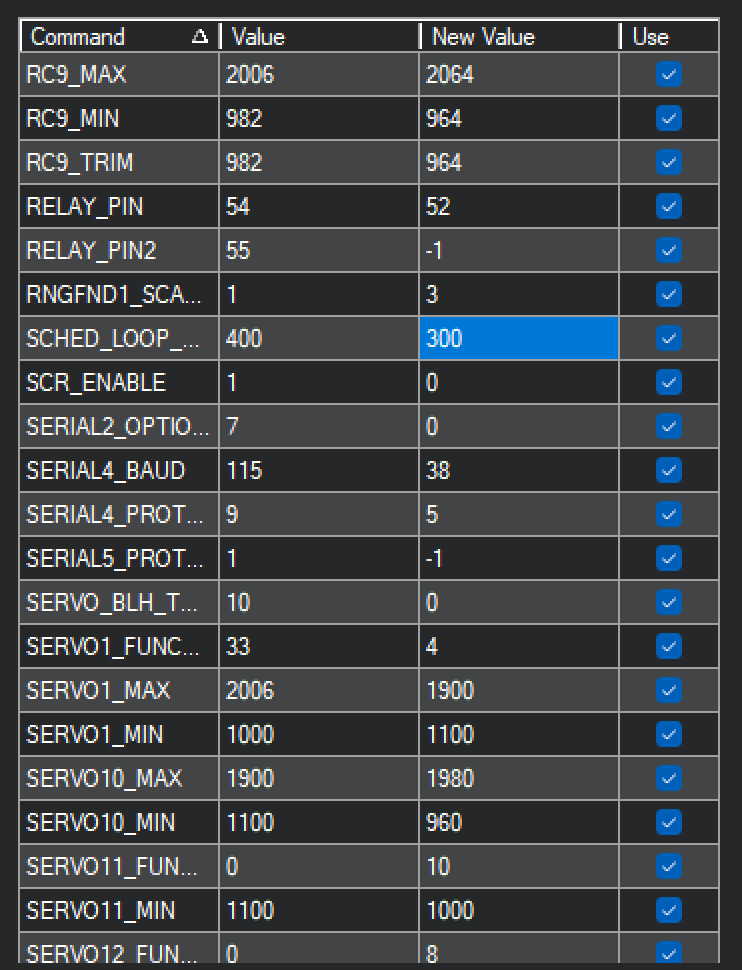
Comparing the files using the Compare Param option, maybe a dumbass question, but is only the different files showing on this window?
Not a dumb question, but yeah that screen shows only the parameters that have different values. If a parameter has the exact same value it will not appear on that list. Another thing you might want to watch out for is that it is possible that copter will have variables that do not exist for fixed wing. In that case I have no idea if it will show up on that table or not. Fortunately I think the rangefinder parameters are exactly identical for all configurations.


 No real danger. However, been investigating a little and I think that what I did was actually to import only the changes - so that mean that all my orignal settings (flight controls where still loaded) but all your other values go loaded - thus sorting out the LIDAR issue…
No real danger. However, been investigating a little and I think that what I did was actually to import only the changes - so that mean that all my orignal settings (flight controls where still loaded) but all your other values go loaded - thus sorting out the LIDAR issue…