Hi Guys,
I successfully maiden my new VTOL plane. Thanks to Tridgell and all developers who made it possible with the great ArduPlane sw.
The idea come from a youtube video, unfortunately the poster dissapeared after posting the video, so I had to figure out most of the things. Fortunately I’m pretty familiar with the ardupilot code and posts in the VTOL topic helped a lot as well.
Why the NIMBUS is ideal for VTOL ? Because the motor mounts are easily modifiable to VTOL without adding any significant weight. The total VTOL conversion adds about 360g to the original weight.
It needs some tuning (Try 3.8.2, Set transition airspeed higher, autotune, etc etc…) but even without fine tunings it flies basically out of the box…
Fantastic! Congrats. Is there a build log of your Nimbus VTOL? More photos please!
Kelly
EDIT: I am building my first MyTwinDream, which I know you know. Could an MTD be VTOL’d? I am planning on landing gear on my first MTD. The landing gear weighs a little over 400g. If I could replace that with ~400g of third motor, ESC, prop, and articulation of two front motors, that would be a clear win.
I owe an apology for Kris Shyi, he is the guy who made the first vtol nimbus, he did not disappeared, in contrary, he is very active on a Chinese forum and posted some updates on youtube as well, (Which I obviously missed.)
Kelly,
I think MTD is out of the question. (At least as a vectored yaw, trimotor VTOL) It has a quite fat rear fuselage, which makes impossible to install the rear rotor. Plus the motor mounts are not connected to the wingspar…
A good airframe for this type of conversion needs a tail boom, like Skywalker, EVE200 or Nimbus…
Great job. I was looking at building a Y3 tilt rotor with my Skywalker, but I see how the Nimbus has the perfect wing installation already, just booms projecting out of the wings.
What prop/motors did you use? Is the tail prop/motor the same as the others?
Thank you for sharing.
It’s work in progress, current props on the front having low pitch, must change to 14x8 or similar.
prop on the back could go up to 16’’ 17’’ pitch is not relevant.
Motors are T-motor U5’s…
Hi, I’m building a Nimbus 1800 VTOL With Pixhawk2 and I have some questions.
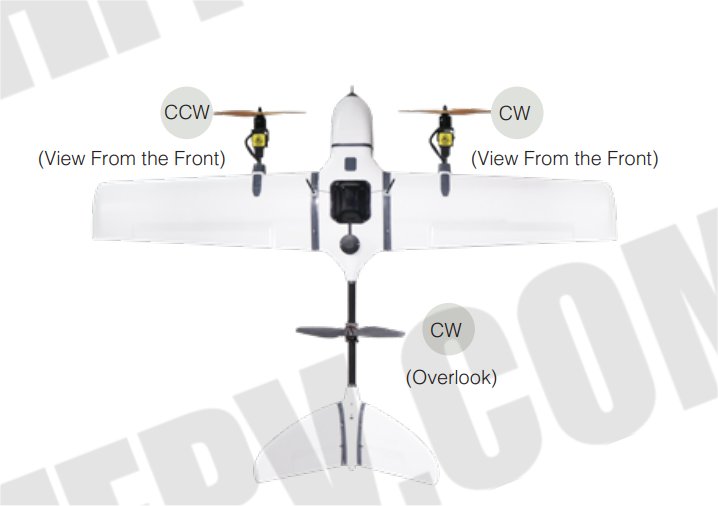
We are making a nimbus So can we know about that setted value for parameters Q_FRAME_CLASS, Q_TILT_MASK, Q_TILT_TYPE ?
Because we are not sure about that
I see that FoxTech changed their front Motors and ESCs on the mapping version of the Nimbus 1800 VTOL. Presumably, the larger motor and slightly higher Kv was to add lifting power for the added camera weight and the Xrotor 50A Pro ESC was for needing less cooling when buried into the foam.
What is your opinion on using the less expensive Hobby Wing Xrotor 40A ESCs versus the higher priced 50A Pro ESCs? Do the hover currents get the 40A ESCs hot or are they more than sufficient for the job?
Foxtech version has a significant shorter front motor booms than other Nimbus VTOL’s that I encountered with. So I think their change was made to overcome the loss of lifting power caused by the rotors overlapping with the wings.
Regarding to ESC’s I don’t see much gain to the 50A Pro versus the 40A, if you take out all fancy leds and “control panel” functions it not much better than a 40A wit BLHeli. In my setup they barely gets warm. (Using U5 400kv motors with 14/8 e-props)
I’m gearing up to make one of these as well for use in SAR. I think I understand vectored yaw but why must the rear motor be larger with a larger prop? If it must be larger then what is the logic on how to pick out the three motors?
I’d also like to call someone to pick up on finer details, preferably someone who has built and flown one already (looking for the tips you only get AFTER the fact)