Registered today after a few days of reading, yes, my head is spinning, as I am new to all of it.
I understand electronics and software; however, I never had or ealt with an RC controlled vehicle, not with any autonomous vehicle.
I live on 10 acres, with 5 acres needing to be mowed. While I like the place, I do not like mowing, which I consider a waste of my time…  so many things I want and need to do; mowing just does not fit the bill ATM.
so many things I want and need to do; mowing just does not fit the bill ATM.
So I read a few blogs on building an autonomous lawnmower; more specifically the MrMower blog. And here I am, wanting to build one of these.
I can weld and solder, hence, building the mechanics of it is not seen as a difficult task. However, the ‘controlling’ side of things is where I am kindly seeking input, which would help me to come up with a BOM I can order in confidence; meaning I have the right parts that work with ArduPilot and a system that works on a Linux Mint machine.
From what I gather, there are three main systems:
- A fixed GPS station to provide a defined reference to increase the accuracy of received GPS SAT signals.
- the autonomous rover with all its electronic bits
- some mission control and route planner software
MrMower had this block diagram:
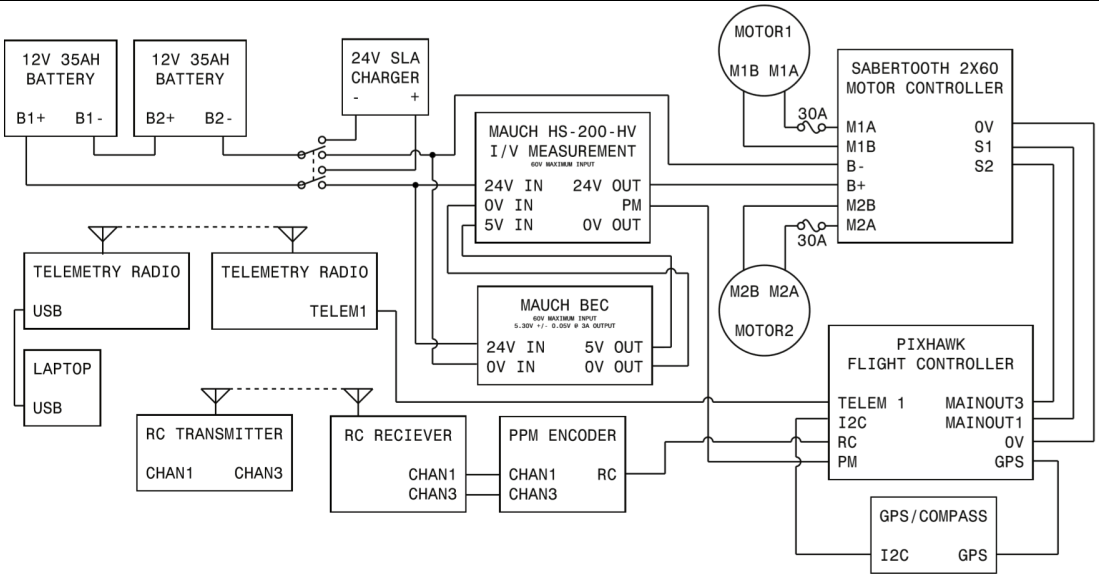
… which agrees with me from a functional perspective.
The only thing missing are the three cutting deck motors, and linear drive rod thingy to adjust the height of the deck.
What components do I have to buy to get this system going?
My philosophy here is, while there is a limit to the budget, I’d like to buy brand gear simply to eliminate any compatibility issues, which would be hard for me to track down, given my current inexperience with these systems.
- I have the batteries (a left over from a solar PV project) 8 LiFePO$ cells 3.2V @ 400Ah.
- I have ordered two wheelchair motors,
- a Sabertooth 2x60,
- the Mauch 24/5V converter, and the Mauch I/V meter.
- have the Linux PC and/or laptop
(…this was the easy part)
I also need (and I am hoping for your input WRT brand and place to buy):
- a Pixhawk 4 FC (there are so many variants that I am not sure, which one exactly to buy)
- telemetry radios; 300m LOS will be fine; since I am in Australia it needs to operate on 433MHz
- RC transmitter and receiver; here I am not sure, firstly how many channels (given the block diagram) do I need.
- I figure start/stop for the deck motors is one channel;
- higher/lower the deck another.
- The drive motors may be one channel;
- so is left/right
- I am really lost on this one; locked at a bunch, but have no knowledge to make even an educated guess on what to chose. all I know it has to be a ‘stick’ controller.
- then there is that PPM encoder, which translates a number of RC channels into a single stream (of sort) for the Pixhawk to decode (I guess)
- I just realised the block diagram does not show the Pixhawk 4 power board; since an image is connected to the Pixhawk 4 and other things.
I had a look at ArduSimple, but do not know what to buy. I reckon the ground/base GPS station can do with Survey performance antenna?!
As for the mission planner type software; I could run the MissionPlanner in a MicrosoftVM on Linux, or chose GroundControl instead. Have no experience with either.
Any hints/input appreciated. Thank you.
