So I got done building my Drone, here are the specs
FPVKing 500-X4 frame
Sunny Sky V3508-580kv
T-Motor F35A escs
Eolo 13x5 props
Herelink
Pixhawk 2.1 cube orange
arducopter V4.0.7
2x 5000mah in Parallel 4s
Power Control Module that came with pixhawk
AUW ~2.5kg
so went out today on stock tune, was flying relatively good, winds were 5-10mph with about 17mph gusts, was going to go out and do an autotune but winds wouldn’t allow so went ahead and just got some stick time with the beast, and it seemed be doing ok in the wind, but was bringing her down slowly and around 10ft started acting funny in a gust and i got a “potential thrust loss (4)” on my herelink, and from there i just brought her all the way down to a land/tipover crash, nothing damaged but my pride. also i was in loiter mode
i dont think i am underpowered since the motor/prop combo is 1.6kg per motor full thrust and my AUW is 2.5kg
i did do a compass calibration right before in an open field, wirelessly from mission planner through herelink controller,
all i can think is that its a PID tuning thing, which was the whole reason i was out there, but winds were too much to do it.
or maybe the limitation of the power module? since i think max continuous current is 30 amps (i dont seem to go above 22 amps during flight) i did order the mauch 100 amp power module, but its not here yet.
So not very good yet at identifying information/correlating issues in the logs yet. Any help would be much appreciated.
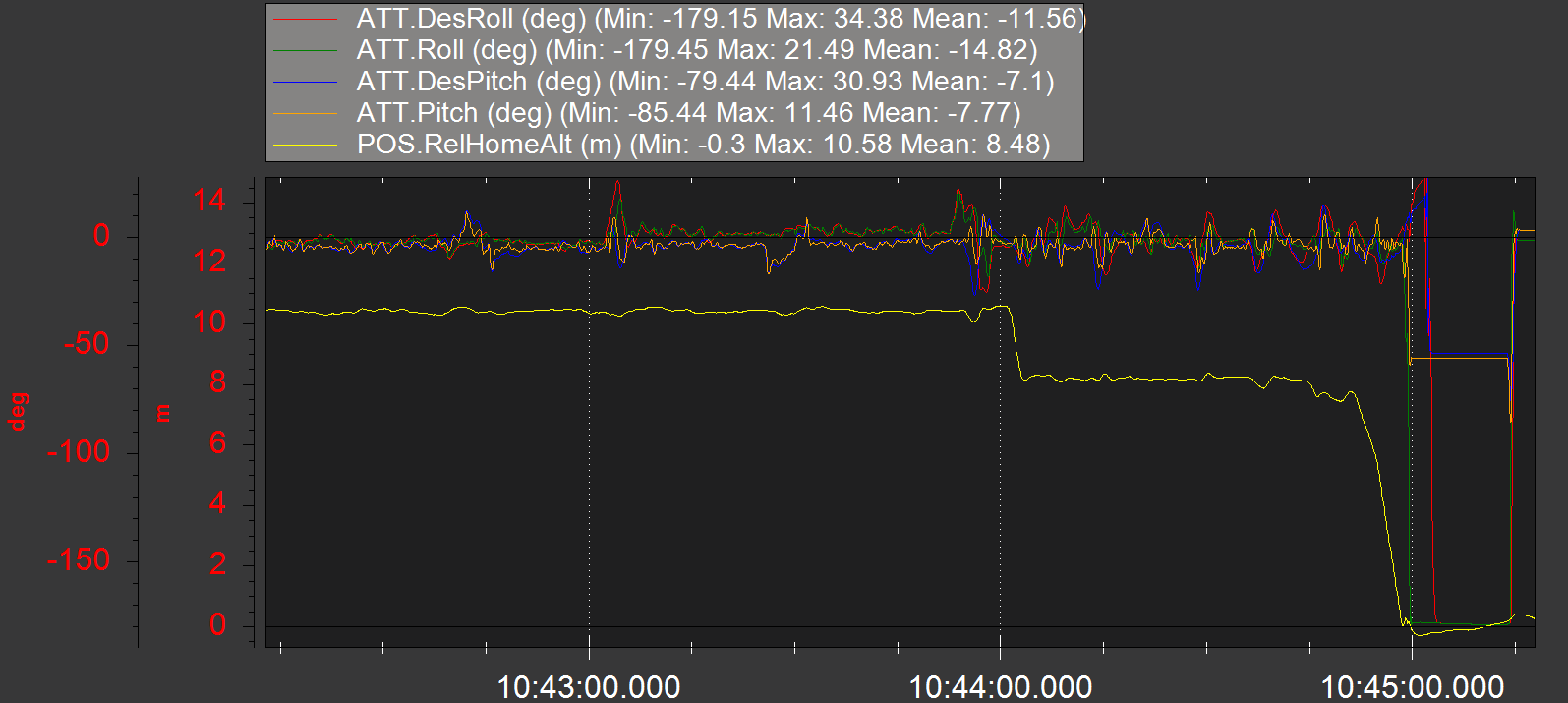
A couple of the motors were occasionally being commanded to maximum during that descent, and possibly because of the wind. Check your RCOU 9 -> 12 to see the effect.
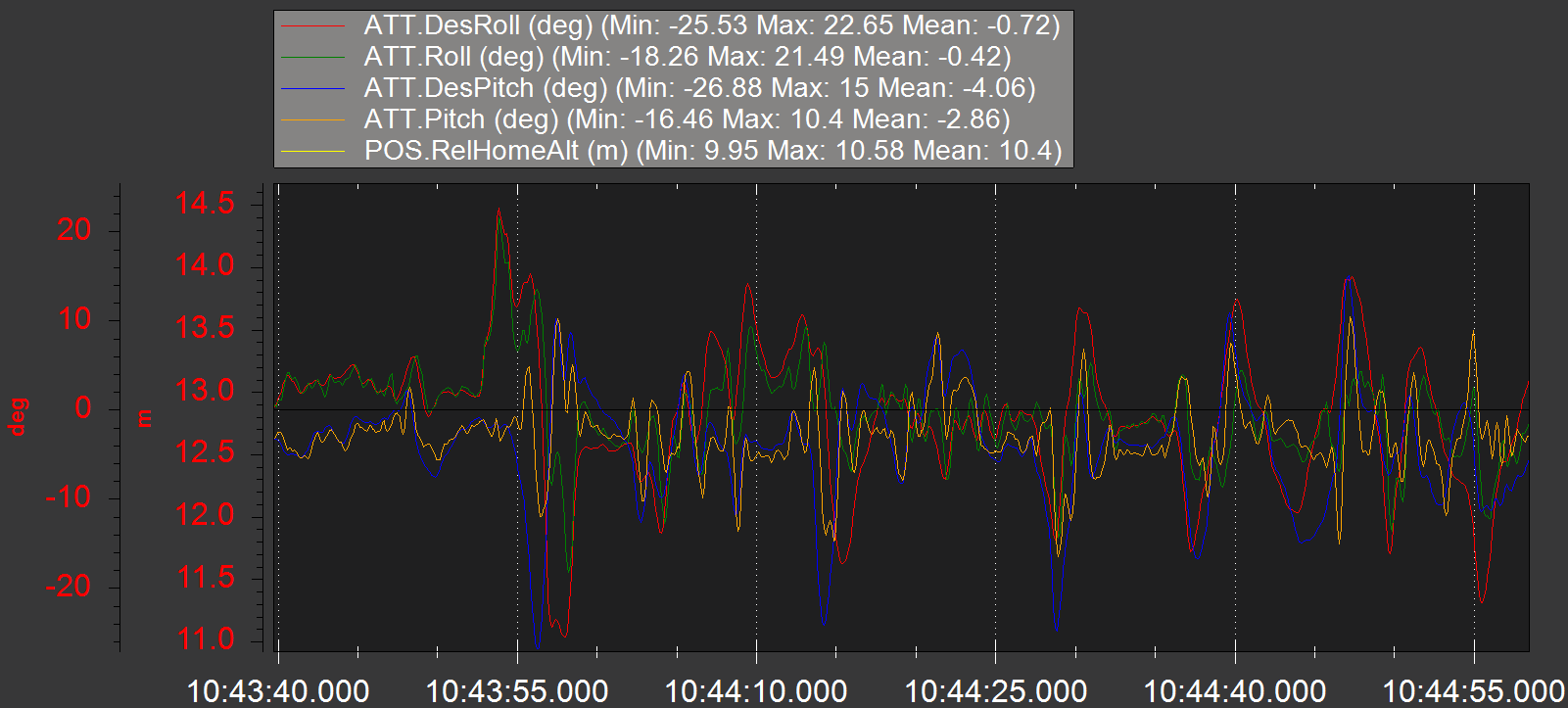
you see at the left hand end of that graph pitch and roll are tracking desired values fairly well, then from 10:43:55 they start diverging frequently.
You’ve got a lot of default values there, I suggest you use this spreadsheet (download a copy) and the Tuning Guide to set up the initial parameters a bit better. Then it will help if you can get the ESC telemetry working to a Telem/Serial port (SERIALx_PROTOCOL,16) and there’s an easy config for the Harmonic Notch Filter (pasted in below).
Then Autotune…
All that should fix up the stability issues and the Trust Loss message will go away.
In that spreadsheet accept and use all the values it specifies, and best to use the “Suggested” ones too.
HNOTCH BLHeli32 telem
INS_HNTCH_ENABLE,1
INS_HNTCH_MODE,3
INS_HNTCH_REF,1
INS_HNTCH_FREQ,80
INS_HNTCH_BW,40
INS_HNTCH_ATT,40
There’ a few other logging settings needed to confirm that 80Hz is correct for you, but yell out when you get to that stage.
awesome thanks for the guidance, going to pop all those params in tonight n go for a flight in the morning, while i got you on the line, i read about t-motor esc’s having linear compensation, do they all or just some (basically wondering if my f35a 3-6s variant has linear compensation) i couldnt find any information saying that they do. maybe ill just call um if u are unfamiliar with those specific escs. Thanks again and ill keep you posted since u invested so much time going into my garbage
your opinion, if i get this tuned in correctly, should this be ok for 18mph occasional gusts? or am i fighting an uphill battle and just go with a larger rig (motors/prop/escs/frame/6sbatts)
or is it one of those things i just gotta see how it performs and go from there?
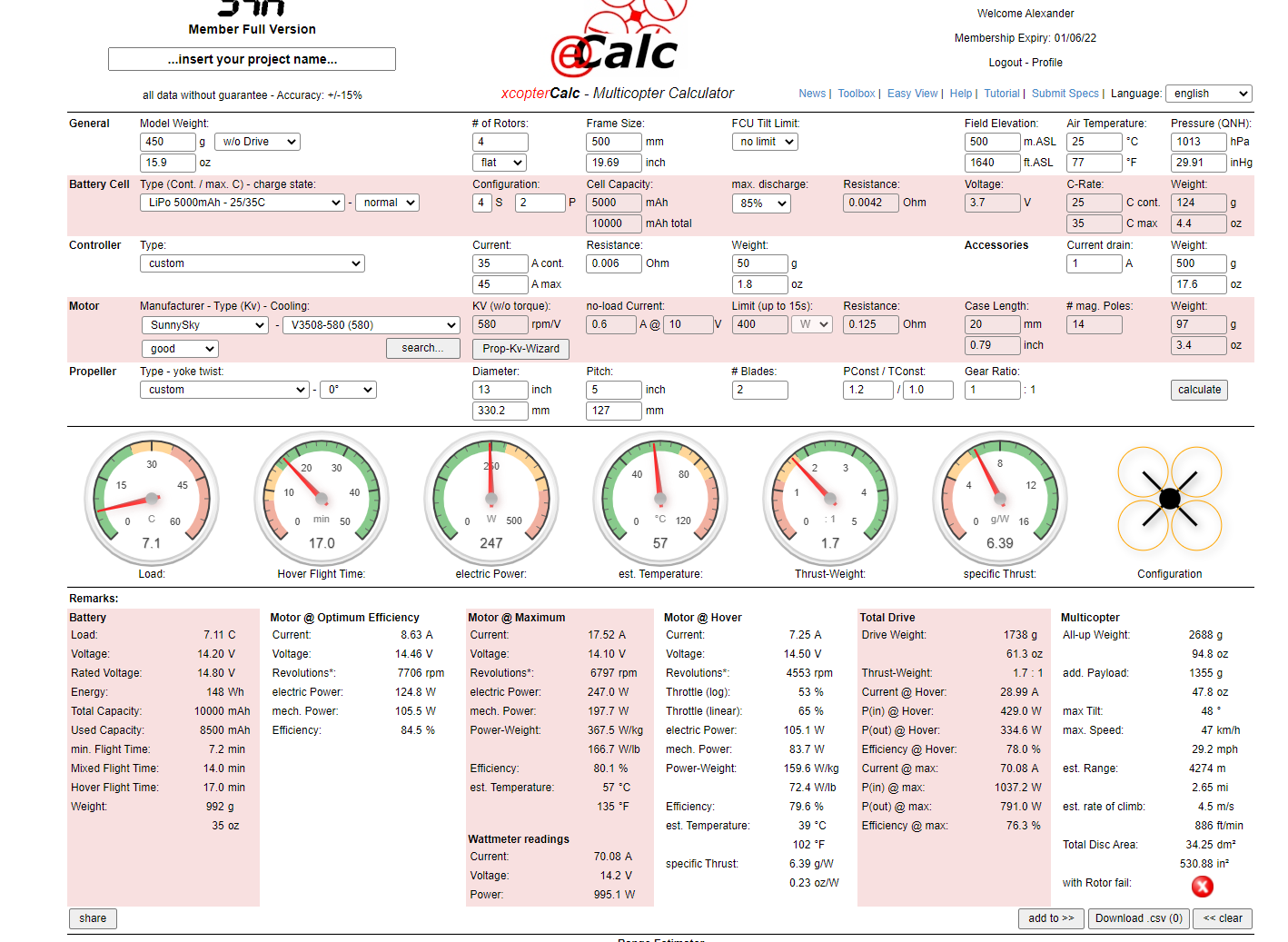
ehh, i think i might be underpowered, changed all the parameters to what you said, went out today to do autotune in next to no wind, once it started the pitching, it started to get a little iffy, and as battery voltage dropped, it seemed to get worse until i got the same thrust loss at about 10 minutes, here are the logs if u want to see, debating on getting a new frame or just extending the arms, bigger motors, 6s battery and 15-17" props, kind of worried the central frame will have issues handling the extended arms. on ecalc my thrust to weight ratio is at 1.7 right now, heres a screenshot
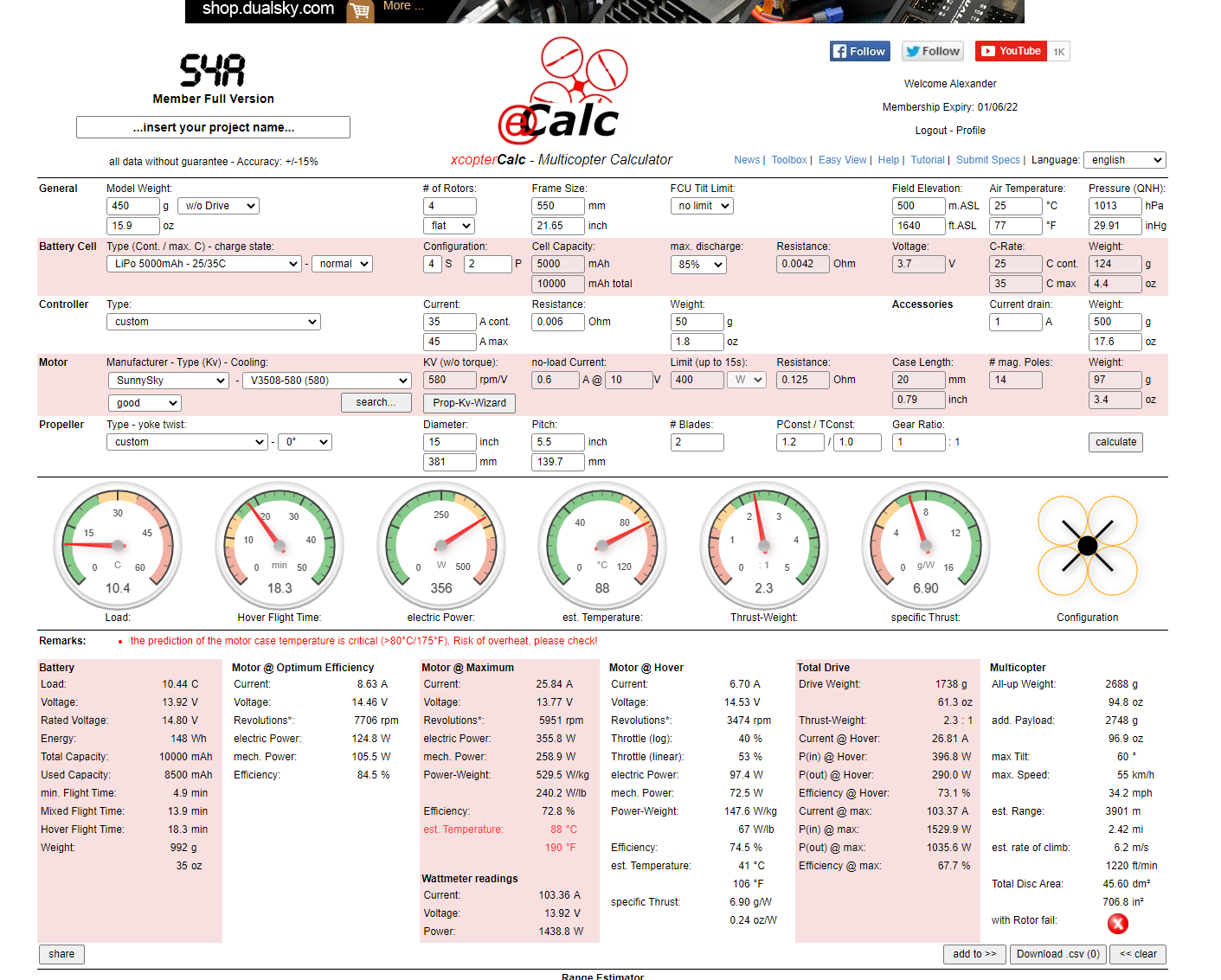
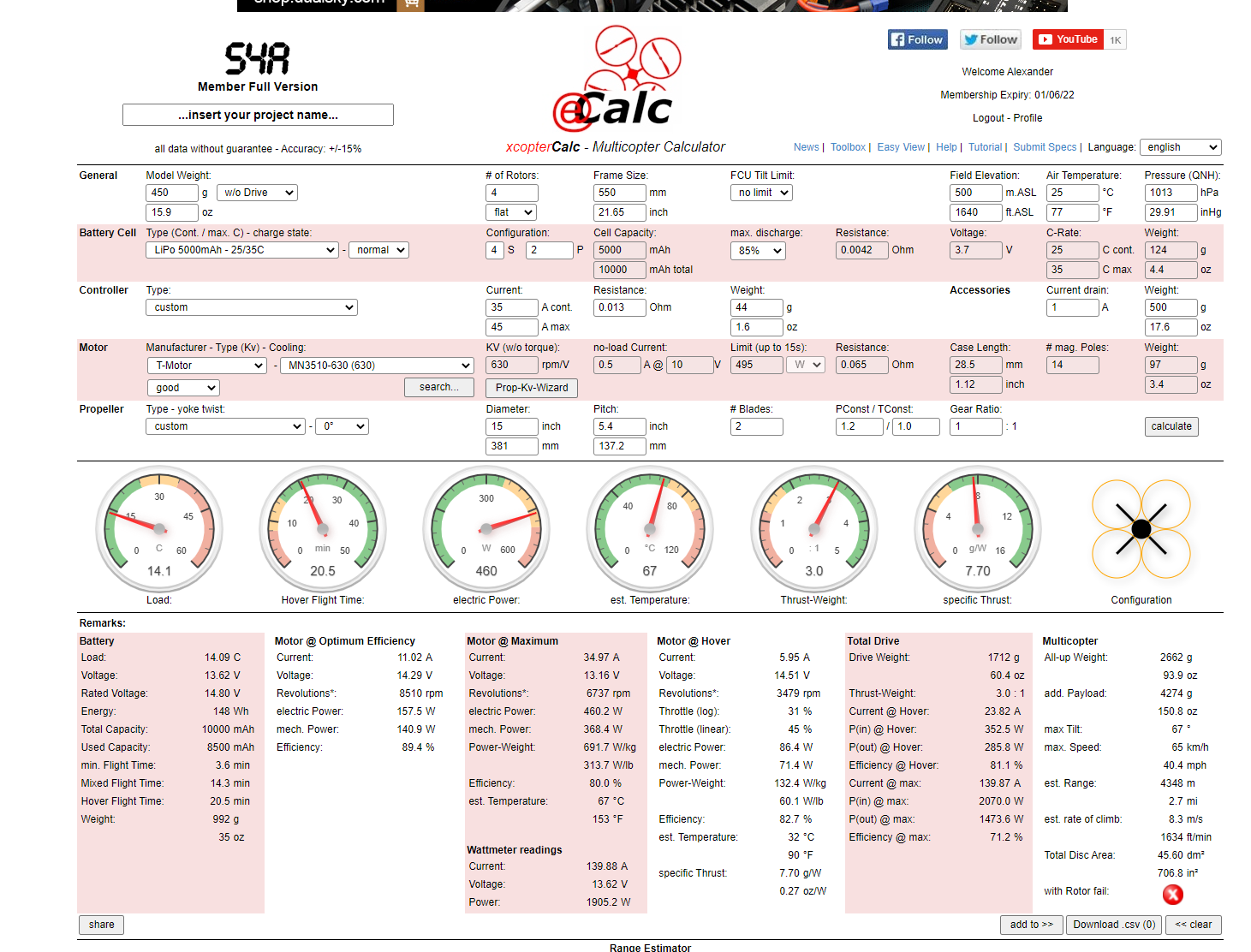
i ended up ordering t-motor 3510 630kv motors along with their 15" 5.4 pitch props, still works with the 4s setup, sucks cuz 400 bcuks added to my cost and now gotta figure out how to get rid of these sunnysky motors lol, this is what ecalc is showing now,