Hi
I have built mine using arducopter and my current system has 7038 props (7inch props) with 980kv motors and 1300mah 3s lipo and X configuration…im using default settings of arducopter except in basic tuning ive setup all my sliders to behave smoothly and no crisp movements. but my quad doesnt hover in mid throttle and leaves ground on arnd 5% throttle and also the take off is not simple straight up but to one direction. yesterday i changed props to 5045 but had to change battery to 1500mah 4s as there was no takeoff…any guide plz?my main concern is why my quad leaves ground so quick and why its not smooth even though the tuning sliders are set to extremes for smooth (not crisp) flying…
did you follow the “ArduCopter tuning process instructions” page on the ardupilot wiki step-by-step?
not yet. currently all params are default but the sliders in the basic tuning page are on the smooth side. you mean to say that the detailed tuning IS MUST before flying?
First things first, did you do mandatory hardware configurations (accelerometer, compass, radio calibrations)?
Were your ESCs calibrated before the flight?
Did you do at least a hover flight (stable or unstable) with the vehicle?
You should at least be able to do a reasonable short flight before going further.
1 Like
@Mustafa_Gokce That is a bit incorrect.This is the correct order:
- do mandatory hardware configurations (accelerometer, compass, radio calibrations)?
- Calibrate your ESCs ?
- follow the “ArduCopter tuning process instructions”
- Perform the first flight in stabalize.
2 Likes
i am using APM2.8 and the tuning guide page shows parameters that i am unable to find. should i update the firmware?if yes then what is the recommended one?
also what is the accurate method calibrating ESCs? i followed the method where we use transmitter throttle and battery connect/disconnect steps…is that reliable considering that we may not be able to detect if any minor difference in calibration? im using Emax Simonk ESCs
Yes, update to Arducopter 4.0.6, but you will need new hardware.
yes, is accurate. yes, transmitter method is fine.
Thanks. can you please share link of the one that should be used?
No, I can not advise one. But I can give you a list were you can choose from:
https://firmware.ardupilot.org/Copter/stable/
sorry i meant the hardware compatible with 4.0.6 version
regarding the firmware list, its a bit confusing for me. whats the difference between each?
That is a list of the compatible Hardware. The firmware inside each directory is already 4.0.6
No confusion. Just use 4.0.6 aka stable version.
1 Like
hi, i did 1)external compass calib (ublox neo) 2)acceleo calib 3)radio calib 4)esc calib 5)all sliders in basic tuning page are towards smooth flying and the throttle mid position value is 800 where max is 1950…my quad does leave the ground but around 5-10% of throttle while i see hovering shud be at arnd 50% of throttle stick
Like I already said above , you do need to follow: https://ardupilot.org/copter/docs/tuning-process-instructions.html
i can not find in my mission planner any of the parameters mentioned in that link. i upgraded to 3.2.1
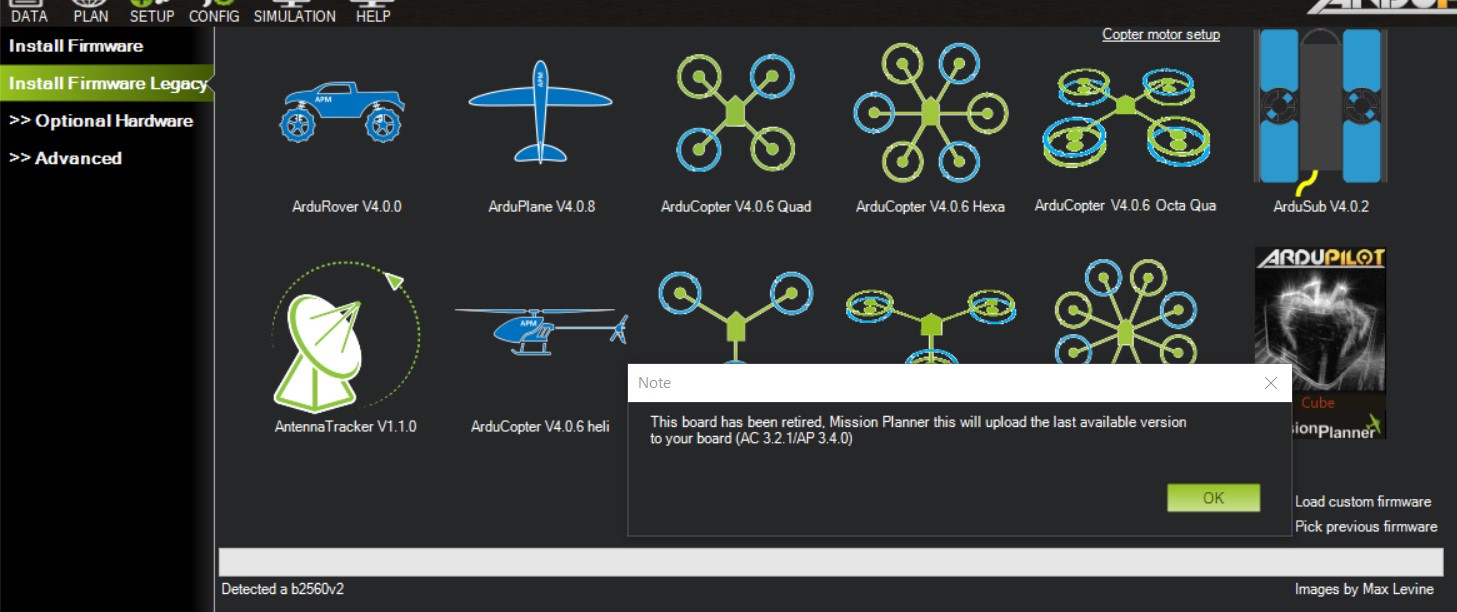
Get one of the 74 different boards supported by ArduCopter 4.0.6
APM2.8 is very old and does not support versions greater than 3.2.1
or … wait for someone that is also using ancient hardware to help you. But there are very few users that use that hardware.
i saw that list and randomly checked some boards…they were damn expensive 
i got this one for just $35
$35 for an outdated board! Now that is expensive. The new boards start at $45
i bought this more than a year back and just now started working
can you recommend me some good reasonable board from that list? i checked just now some boards line CUAV, omnibus, cube, drotek…all were $150+ on average
For ~$50 your choices will be bare board style Flight Controllers. Nothing wrong with them I have many but assembly and cabling will be different. Look at F/H 7 boards from Matek and Holybro.
1 Like