Hi Rolf,
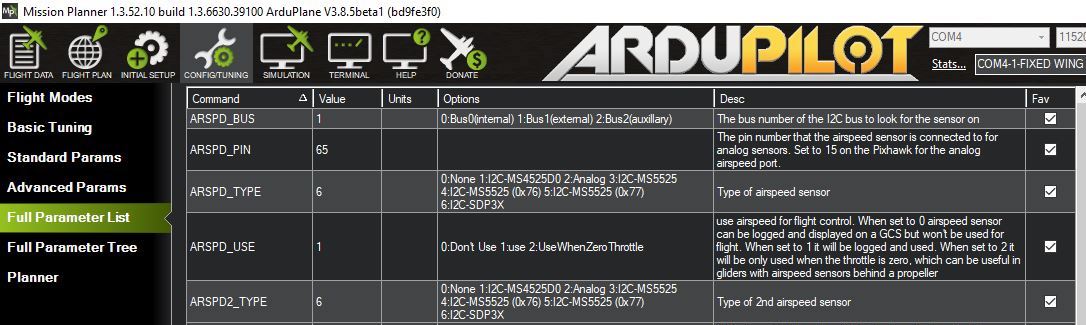
I tested the sensor again. With AP3.8.5B1 I cant get it to work, but with PX4 1.7.4 it works! Same wiring. Tested on PH2.1
Even checked the logs and airspeed reading is always zero.
@tridge Must be some issue with the code !? Changed I2C address?
How can I help fixing this?
Best
David