Hi everyone,
I would like to build a rover based on the ardu-rover project.
I would like to start small and expand it ,in time…
I need some advice on a flight controller…i see some of them are very cheap and some are very pricey…maybe someone can give me an advice on a good flight controller, something that will be easy to use but wont break the bank…preferably a future proof one, in case i will want to use it for other projects.
I was also looking at those bodies + wheels + motors:
I think you would be better off with a $200 crawler. It will handle more terrain.
something like below.
For a cheap Good FC I would go with a PIXHAWK 2.4.8
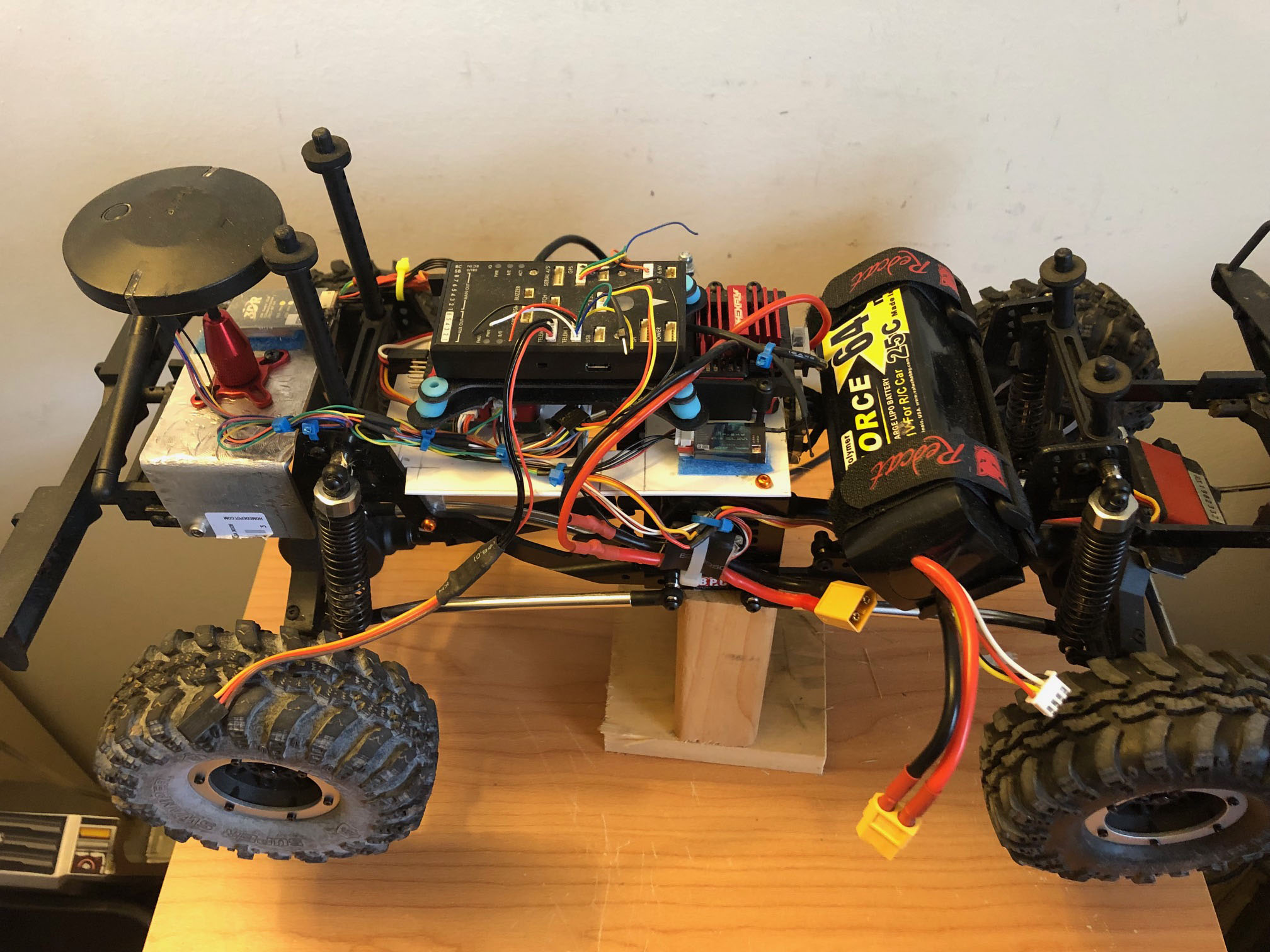
Curt’s advise is good. Here is my Redcat Gen7 Rover setup. I’m using a PixRacer but only because I had a couple lying around. You could use a Pixhawk 2.4.8 as Curt suggests but space is at a premium. An F7 board like Kakute F7 AIO would be a good choice also. I’m using one of those on a plane and they are awesome AIO FC’s.
I also prefer something that require none or little soldering,
i wouldn’t mind learning how to solder though but maybe not something that i have to solder everything.
Sure, those flight controllers will work but it will be a challenge to package a full size Pixhawk on this vehicle. It’s unrealistic to avoid soldering in this hobby. Plan on buying a soldering iron, shrink tube in various sizes and a multimeter at a minimum.
The vehicle is a stock Gen7. I added 2 mounting platforms for components that are assembled to the frame with brackets and screws. This required re-mounting the ESC but this was trivial. It’s a Pixracer flight controller which I have a few of. You will need to replace the RC system as you will need more channels than it provides. I use Frsky gear with an X9D Transmitter and in this vehicle a R9 Slim Rx which is their 900Mhz longe range line. The GPS module is a Here GNSS but you can use what you like. There is a power module installed also to power the FC and peripherals and provide voltage and current data. I’m using an ESP8266 telemetry radio which I use on most craft. You can use the 433/915Mhz telemetry radios if you like they work well.
For reference this photo shows a full size Pixhawk sitting on top of the current setup. You could get it in there but it would be tight. You definitely need easy acess to the spur gear as I have replaced a couple of those from stripped gears when the vehicle has hit something on an auto mission and chewed away on the ground until it auto disarmed.
If you use an F4/F7 AIO board the battery will connect directly to the flight controller typically up to 6S. These boards also have on-board current and voltage sensing capability. If you go with a Pixhawk or the many variants of it you will need a power module. I would for sure use a Kakute F7 AIO if I was building a new Rover and had no hardware. They have integrated OSD also. However, lots of soldering…
I only here great things about the Kakute F7. I do not have one yet so I can’t say personally But I am buying one after this conversation.
Don’t be afraid to learn to solder, It’s fun! I have marshmallow size fingers and 3 are missing. If I can do it you can. I am so clumsy watch & see.
Review the specs between the FC’s you linked to. The 1st is an AIO, the 2nd is not. The Pixhawk is a generic 2.4.8 kit with a bunch of accessories. Nothing wrong with any of them.
I don’t know where you are but domestics sources may be a better choice.
That chassis comes with 4 brushed motors of unknown quality. But if that’s what you can afford you will need ESC’s for it. There are several choices. Many use Sabertooth dual drives, these cost more than that chassis. Or you could use brushed ESC’s for RC cars/trucks.
That flight controller package is OK as a low price selection. I have a couple of those 2.4.8’s and they work.
What is your plan for “WiFi Control”? Control with what? You will still need an RC radio system to setup, configure and calibrate the vehicle.
For a battery those motors are 12V capable so a 3S Lipo. Maybe somehting in the 5000-8000mah range.
OK maybe i must review everything again…sounds like its a terrible setup.
and I was under the impression I won’t need ESC’s if I get this chassis.
The radcat seems nice, and within budget, however with amazon shipping,and taxes the price double.
Maybe you have another recommendation for me?preferablly from bandgood.
My plan was to control the rover over wifi first , and get a proper transmitter later…
is that not a good idea?
I don’t see much on Banggood but a 1/10 scale Crawler makes for a good base vehicle. Or you could go with a chassis like you linked to for a 4wd skid steer system. Lynxmotion makes several different models. Do you have a purpose for this vehicle, maybe that will help with some suggestions.
You can control the Rover via WiFi. You can use a game pad for example connected to Ground Station software running on a laptop. I played around with this using a Logitech USB pad. But you will still need an RC control system to setup, configure and calibrate the vehicle.
I must say that i think i prefer the 4wd chassis look over a 1/10 scale.
I am just trying this out for fun project, it will be use mostly indoors…but i would like it to be able to go outside, and set up way points, geo fancing, return to home, etc.
It doesn’t have to be super fast, but I do want a decent speed.
I prefer the look too. Unfortunately, To do most outdoor missions you need the crawler suspension. Crawlers are not fast but they have good speed/power ratio for auto missions. They are ugly but do not get stuck in small potholes, grass edges or rocks ect… I built a track skid steer and it gets stuck on something every mission in my yard. I converted a 4wd dump truck and it does about 50% of the terrain compared to what the crawler will do. You can have a trophy but you might not get her to do any real work.
Yes, as Curt says if you want an outdoor capable skid steer rover you would want one larger than these you are looking at and they get expensive. No suspension, relatively low ground clearance and the fact that skid steer requires a good amount of torque to maneuver (skidding right?) . You need a dual ESC (2 motors per) where on a crawler only one is required.
The one problem you can encounter on a Crawler is the turn radius. If you need something less than ~1m (mine is 1.1) then they won’t work for you. Well, a 4 wheel steer might but that’s more complicated and a lot more expensive.
Also temper your expectations of positional accuracy on the ground with typical GPS modules. A meter or 2 in the air has little significance., on the ground it can be a collision. Even with carefully recorded manual waypoints each mission can be a surprise
.
You don’t like ugly? This will work but… cars have a larger turn radius and are not as good as crawlers for rover. Cars are fast so you will need to make some adjustments to slow mission speed. Cars break easy because they are fast. It’s hard to damage a rover.