So just looking for some directions from the community. I have not downloaded any logs yet. The flight controller is a little hard to get at.
So here is what I am looking for advice on.
I maidened my discover clone today. Flew nicely.
I tried loiter and it was solid, but I noticed it wasn’t hold altitude properly. I needed to adjust the throttle slightly. But after a little tweak of the throttle the loiter was spot on. Very impressed.
Then I switched to RTL and this is where it went wrong. The machine started it’s way back to the takeoff point but it did so with a slow and steady reduction in altitude. I had to raise the throttle manually to keep it out of the weeds. In the end it still went into the tall grass.
so just thought I would put the question out there. Will try to grab the logs later today.
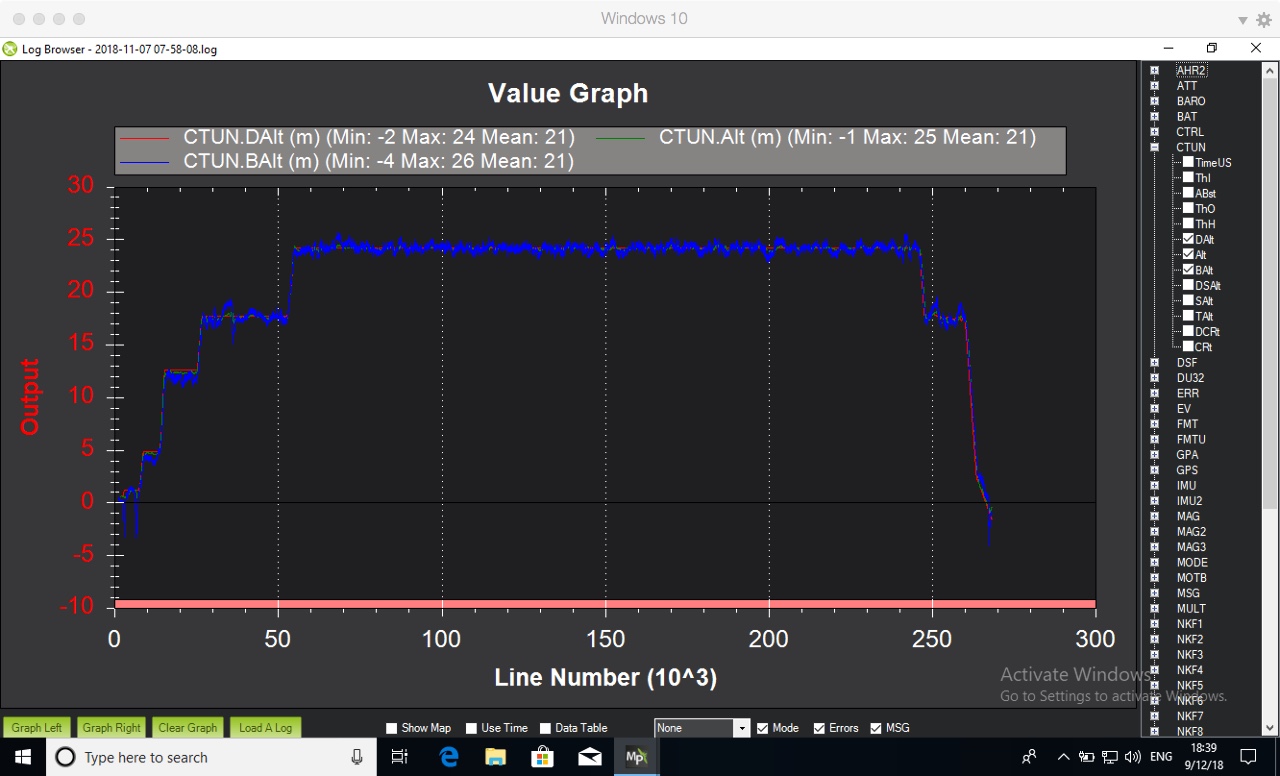
This happens to me all the time with my pixracer based QAV-180. Consensus is that its related to vibrations, but who knows - seems like the pixracer might be a little more susceptible to these. Check Ctun.Balt vs Ctun.Alt - might tell you something.
Thanks Andy. Will get the logs off as soon as I can.
I had heard that vibration may be an issue with the pixracer. I wonder if anyone has a solution for it.
Also I struggle with vibration being the cause because the copter loiters spot on once the throttle is set right. But once it’s switched to RTL is starts to fall. The throttle hasn’t changed.
I need to get the logs off this thing, but that just sounds fishy to me.
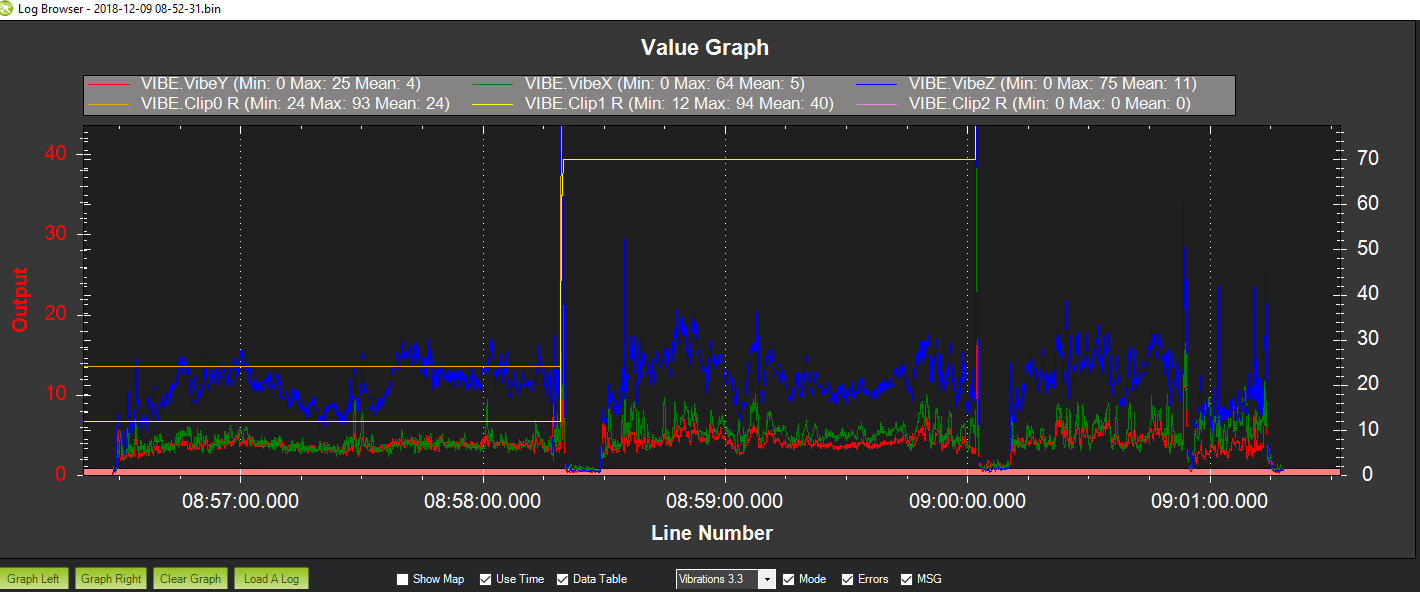
I have a pixracer version rc-15, mounted on a frame of 210 mm., Made of aluminum 6065-T6 and coupled with 3D printed plastic and my vibrations are below 10, at least on the axes “X” and " Z “, and on the” Y "axis are between 15 and 20, which are considered values within the acceptable range, I have not had problems with the reduction of altitude in any of the auto flight modes, except when the drone takes off until a height of less than 5 meters.
Near shure that are vibes, try to see log, you can check tlog too and see vibes graph bars in the hud.
I had that issue in the past with Apm and where vibrations.
I have a pixracer hard fixed in a racer 270 and fly nice, I have to check if I disable the noicer imu because I didn’t have any space for antivibration system but if you have space put an antivibration bed with bals rubbers, that work well.
Check your balance motors and props too first.
Another cause if not vibes perhaps is pressure changes over the Fc.
Nice, can you do a test if you go to fly? Try hover in pos hold and them fly fast from one side and them to the other always in pos hold and see if you lost altitude, sometimes more for one side than other, I don’t have the pc with me now until tomorrow to download log. Be carefull not to crash.
hahahahahahahaha
I will give that a try. I am just a bit puzzled. I could have a problem with the foam on the baro and will check it tomorrow. Perhaps it’s come off or perhaps its not on properly. So will confirm.
i tried to deal with pixracer on smaller frames and just gave up on it. that was the whole reason to swtich to kakute f7 as it has IMU module mounted on the foam pad. in combination with using rubber mounts it actualyl does a decent job keeping vibrations away from affecting stability of the flight.
and, use a LOT of foam over baro - i do now pretty much same size of a FC itself, an inch think and compressed. simple test is - connect FC to MP with no foam, blow straight into the baro and see how ‘alt’ changes. then after it is covered with foam - repeat it from all angles, and see if alt reading still changes dramatically.
Still struggling with the idea its a baro issue. I put the machine in Loiter and once the throttle was set right it has a solid loiter with perfect alt hold (possible deadband issue). Taking it out of Loiter doesn’t change the baro’s performance. Yet the machine starts to drop once it’s in RTL.
I will check the RTL settings in case there is something odd in them.
Also enough people are starting to report issues with vibration on the Pixracer that I am looking at alternatives.
so, just going by memory - rtl has a param that defines a circle within which it starts the descent.
there is also a param that needs to be set no non-0 value if you want copter to get to some initial altitude when RTL is activated.
if it drops down when RTL is activated it may mean it all is misaligned and it thinks it is on some other altitude - on all my models i actually keep that param at 0 to avoid model from changing altitude when rtl is kicked in, as i either well above trees when i fly or in the open space.
I am trying to use an external baro sensor with a Pixracer running Copter 3.6. The instructions provided under “Copter” for adjusting Parameters no longer works.
I have not tried waypoint navigation with this new build.
I re-Maidened it yesterday. Basically got it off the ground and tested various aspects of flight. Apart from some pid tuning the machine flew fine. One test is to check Loiter, I need to see if loiter works and if there are any issues like a compass problem or GPS issue. Loiter was spot on…all good.
So after sitting in loiter for 5 minutes, I am watching for issues. I then switch to RTL and the machine starts to loose altitude. Now Paul Atkin got me thinking about the RTL settings, all where correct and i have no issues with them, They compare to the machines previous config when it was an APM Mini 3.1. So no concerns.
But then I saw this setting RTL_CONE_SLOPE 3
I have never seen this and when I read the wiki…well it was useless.
Here is what the wiki says
RTL_CONE_SLOPE: RTL cone slope
Defines a cone above home which determines maximum climb
3 = Steep
Wow thats really helpful.
I am guessing what it means is that if I imagine an inverted cone extending up from the home point, that if the copter is with in that cone it will just land. If outside it will perform a true RTL. Unfortunately it doesn’t provide information that would allow me to know if I was trying to RTL with in that cone.
I need to get the machine back out and test some more.