Resolved
Thanks to [geofrancis]!
TLDR: Measured altitude jumped up 80m shortly after takeoff and the plane ended up crashing.
Hello everyone,
I recently crashed my flying wing, and noticed some issues with altitude from my DVR.
I am new to Ardupilot, and thought I had everything in order when I launched my flying wing into the air. What I hadn’t noticed was that my altitude had drifted to -16m just as I was about to launch. This certainly caused the plane to fly higher than the defined 50m takeoff altitude, but that’s not the terminal issue.
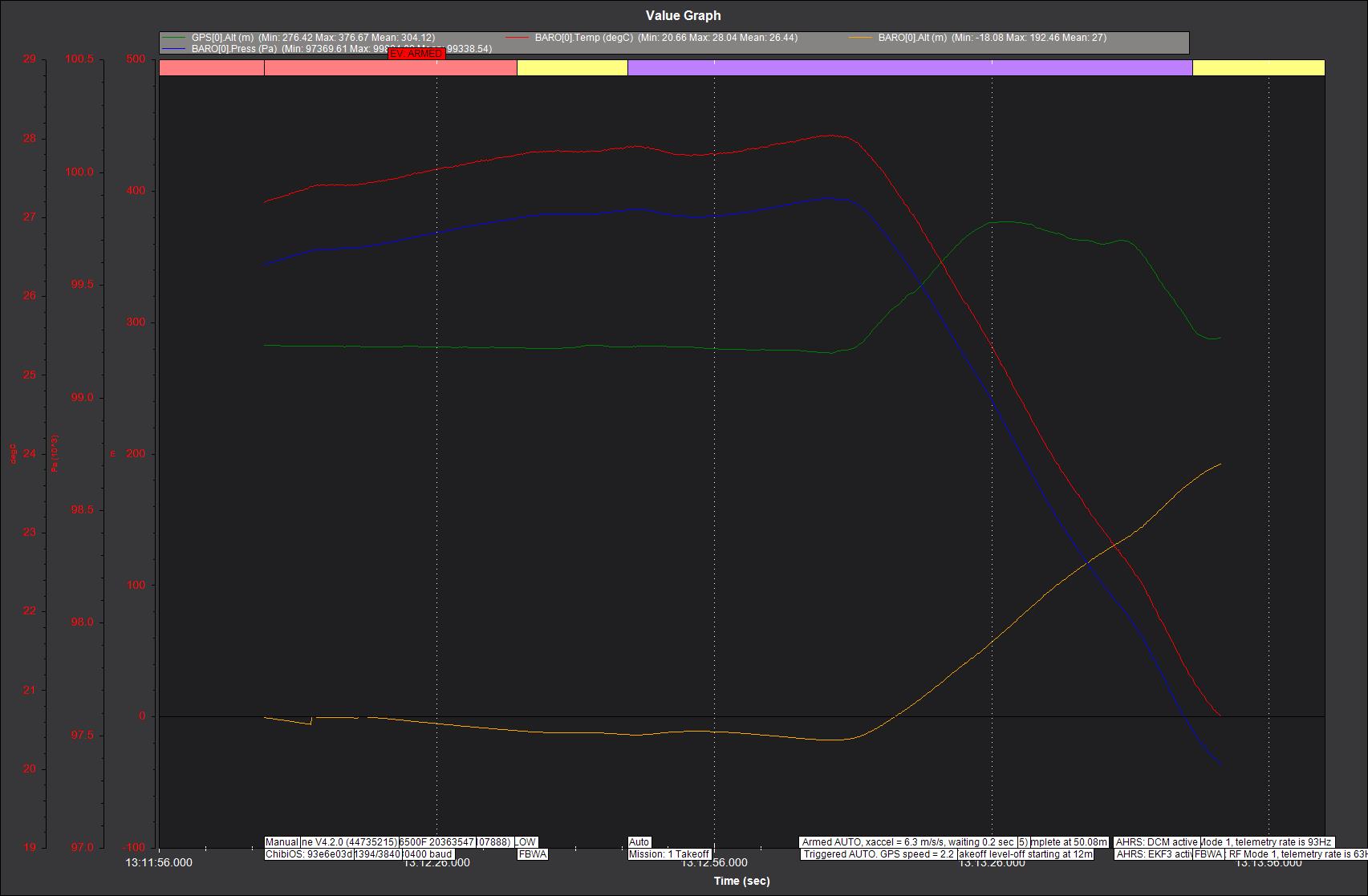
Shortly after the takeoff waypoint was completed, I received this message: “AHRS: EKF3 Active” and the altitude jumped from a slightly incorrect 54m to a wildly incorrect 131m in an instant. This caused the autopilot to immediately and rapidly descend. I took manual control at this point, but still ended up crashing. This same behavior had happened twice before, and I tried making different changes… but unfortunately the third time it happened the aircraft was destroyed. My foam airframe was totaled, but the electronics survived. I am going to rebuild the plane, but would like to understand what I had configured incorrectly before I launch the rebuilt plane.
Below I have attached a photo of the launch altitude, a video of the altitude anomaly after takeoff, and the log of this flight. I looked at the log myself, but being new to this was unable to understand what I had misconfigured.
Here is a picture of the incorrect altitude just before launch:

Here is a video of the EKF3 Active notice along with the sudden altitude change:
Video of Altitude Anomaly
Log attached here:
00000014.bin
Thank you for your help!
-MPRS