I’ve installed larger motors and longer arms on my Holybro X500 V2. Props and everything else is the same.
I did an initial test flight with the same tune as what I had before - and the copter was stable in Altitude Hold - but oscillated in Loiter. Not a toilet bowl - just oscillations.
I went back to the beginning and repeated the Initial Parameter Setup in Mission Planner - took all the options, did my test flight, and did the second set of parameter changes as directed.
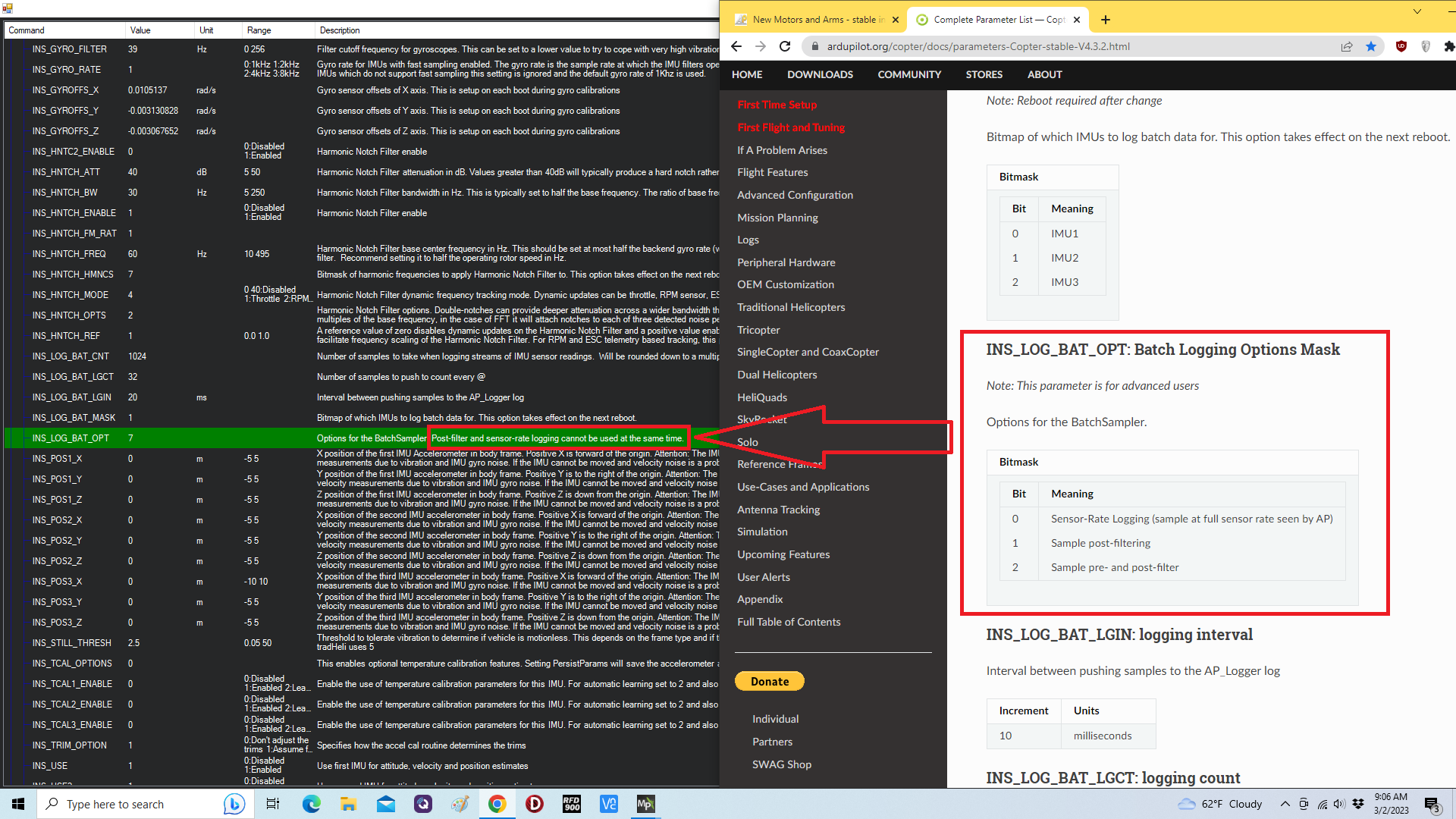
This un-did the auto-tune I’d done on my old setup. I left my FFT settings alone.
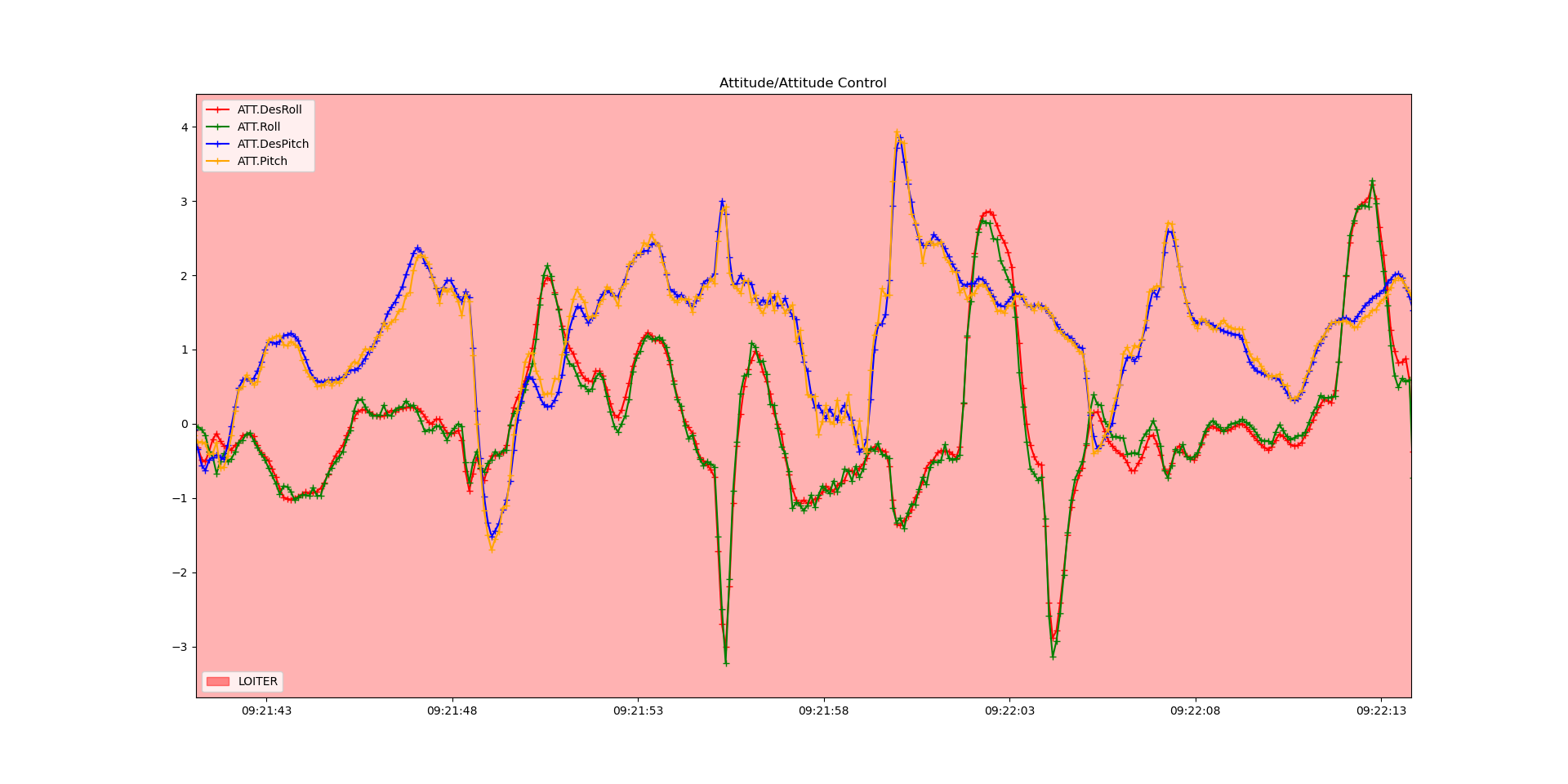
Test flying again - the copter again was stable in Altitude-Hold, but oscillated in Loiter.
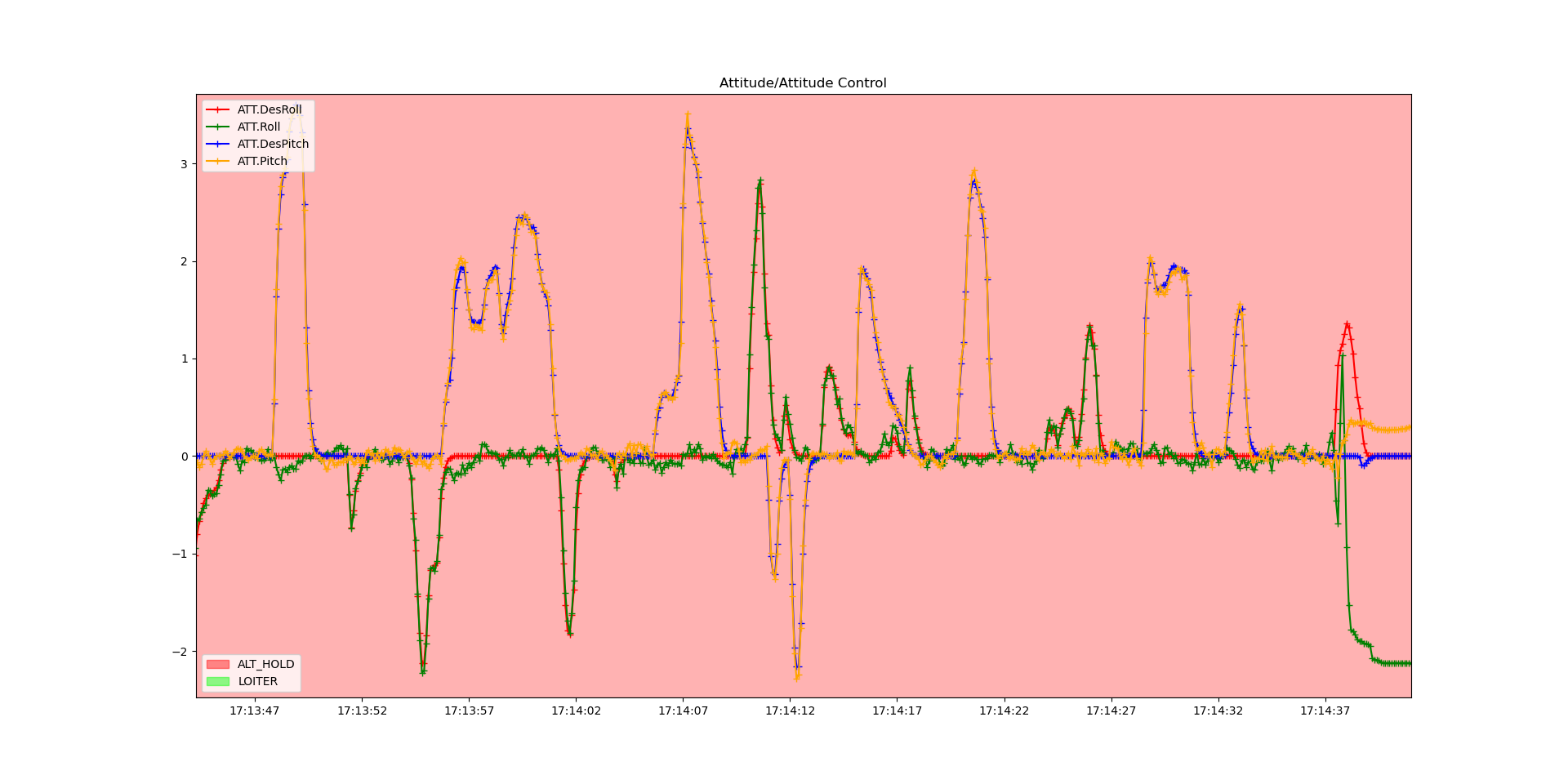
ALTITUDE HOLD:
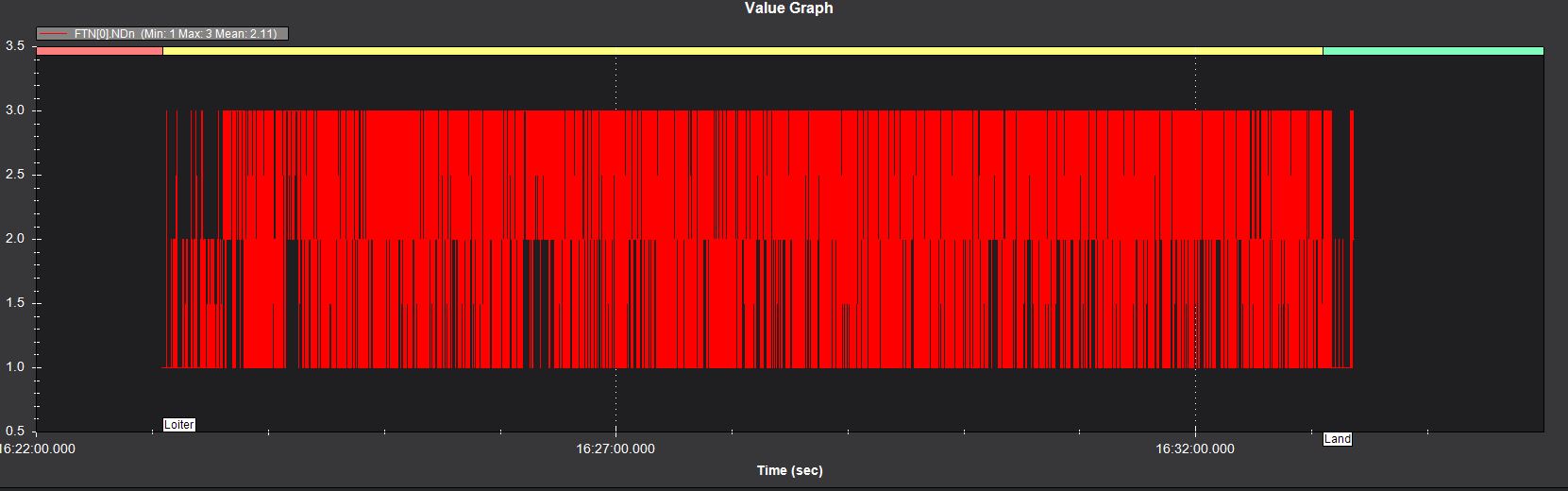
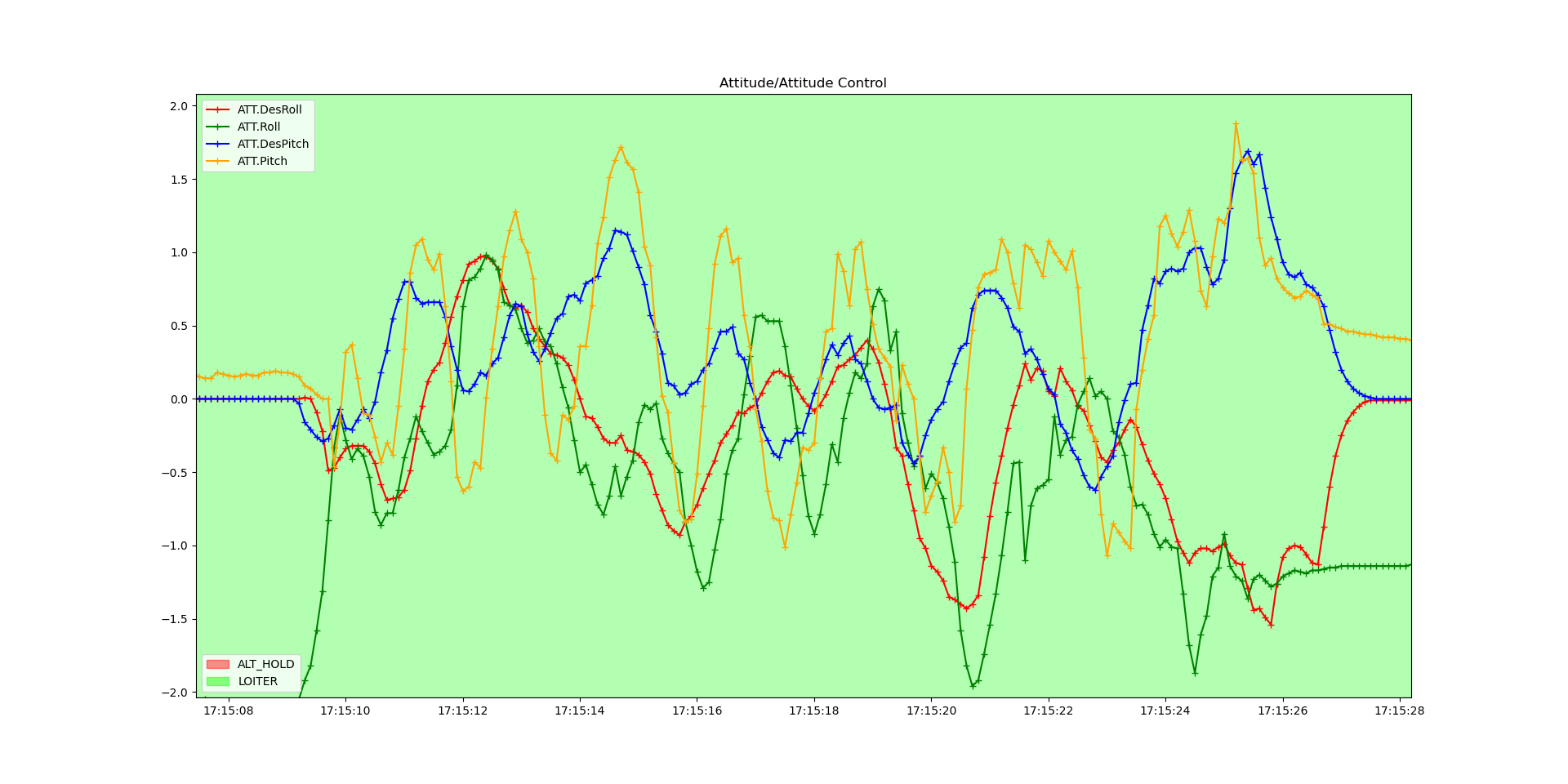
LOTER:
The vibe numbers look good, but there is a yaw in the motors shown in the RCOU. No doubt, I don’t have the new motors mounted straight yet.
Compass calibration is excellent.
I’d like the copter to be stable in LOITER before I attempt a new Auto Tune - but I think I’ll need a bit of guidance to achieve that.
I’d appreciate all comments.
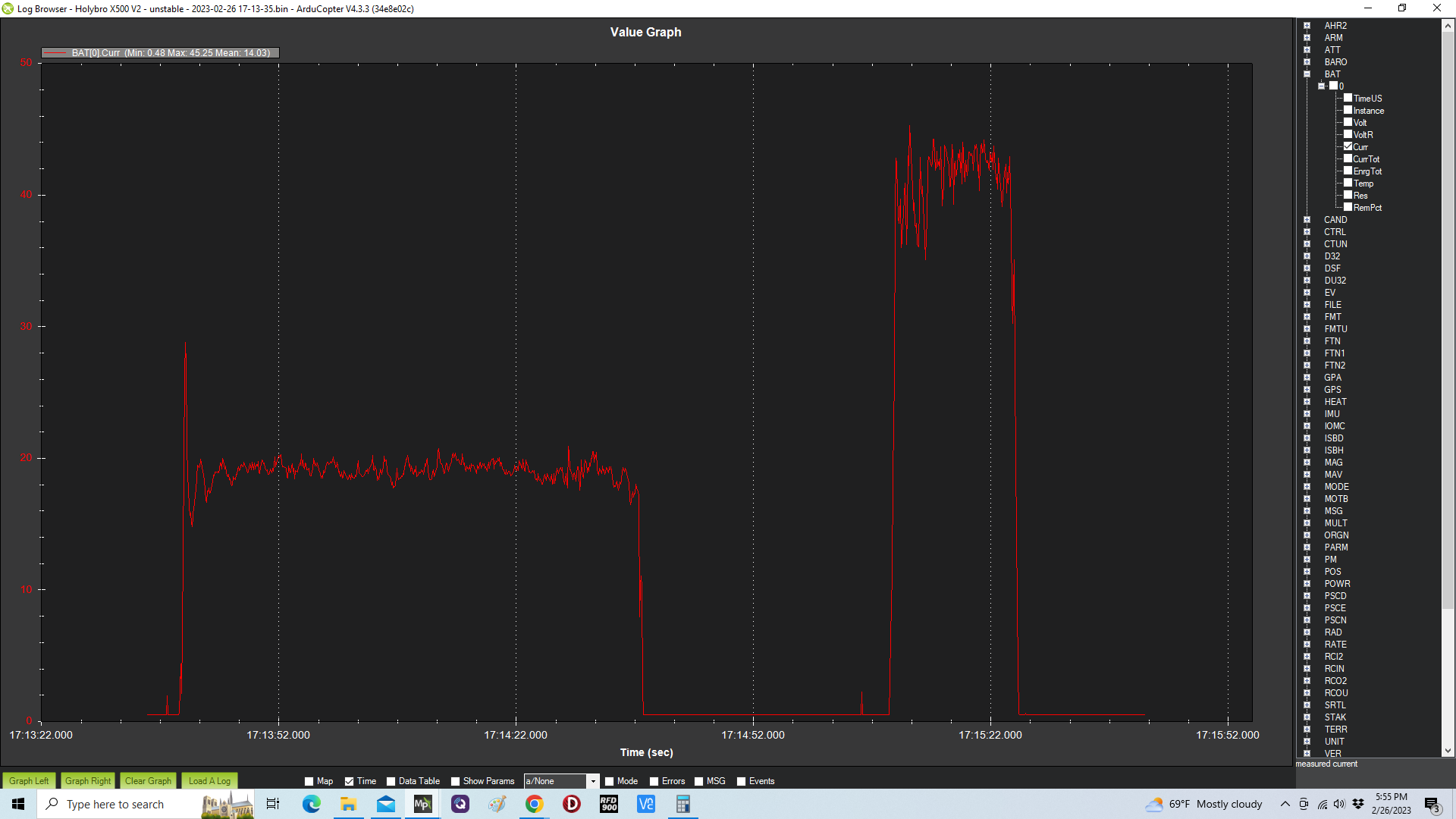
This BIN file has a short flight in Altitude Hold - followed by a short flight in Loiter:
Old and new arms and motors:

ADDENDUM:
I just noticed that the current doubles from 20A to 40A from Atlitude-Hold mode to Loiter.