Hi, I tried with i2c
Did you set the unit to i2c (default is serial)?
Hi, Yes, I connect together pin 5 with GND (i2c mode)
just try uart instead of i2c
I tried now in serial with the pixhawk 1 and it works, the problem is that on the omnibus nano f4 v6.0 I have no other serial available (I connected S.port and optical flow) and on my 3 "quad I obviously have to use the omnibus nano
The only solution you have as you don’t have a serial port available its the i2c…, take a look on benewake site the i2c firmware for the luna.
Hi, I tried with i2c and pixhawk but no way. I suppose that fw of my TF luna Is not updated. This is my bag and i2c is indicated …
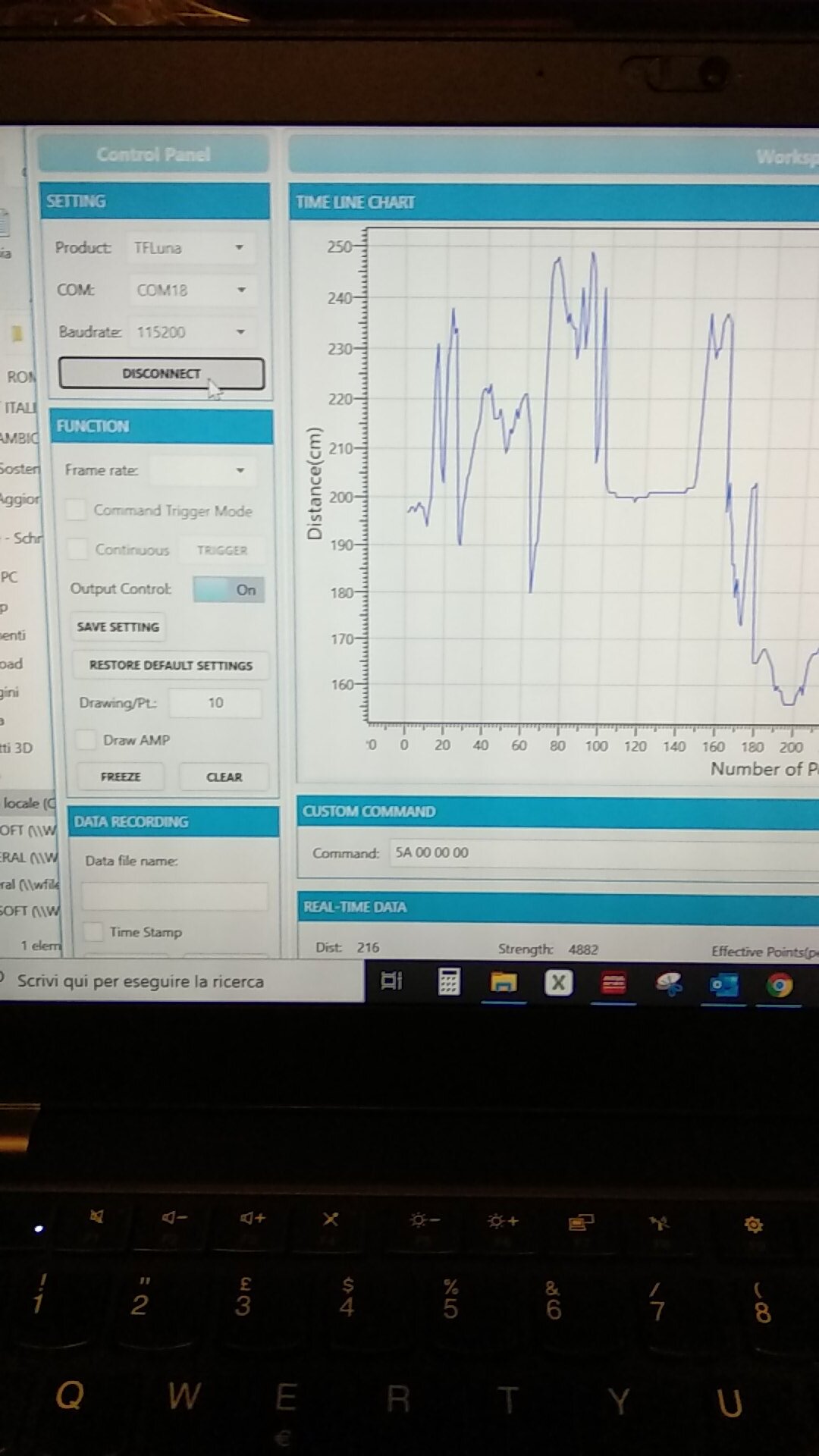
I was able to update the firmware using a Windows computer, an FTDI cable and their software. After that, i2c works. You can see some of my screenshots above.
1 Like
That’s not so obvious. It’s not the only 20x20 board supported. It’s the one with the least amount of UARTS though ![]()
Dave, if I have to use TF luna on a 3 "quad (sub 250g) the choice is OBVIOUSLY omnibus 20x20 nano (for the fc that I have available). Pixhawk is only for testing TF luna in a known configuration.
Why is it OBVIOUS? Matek H7-Mini or a Kakute F7 Mini?
Because I only have omnibus nano and pixhawk
Hi Ari,
May I ask for which of the Benewake sensors you made this comparison?
It looks very promising.
i connected the TF luna to FTDI. Is there any way to know which FW is installed? I’m afraid of the brick!  Thanks
Thanks
I tried to update firmware but I have this error:
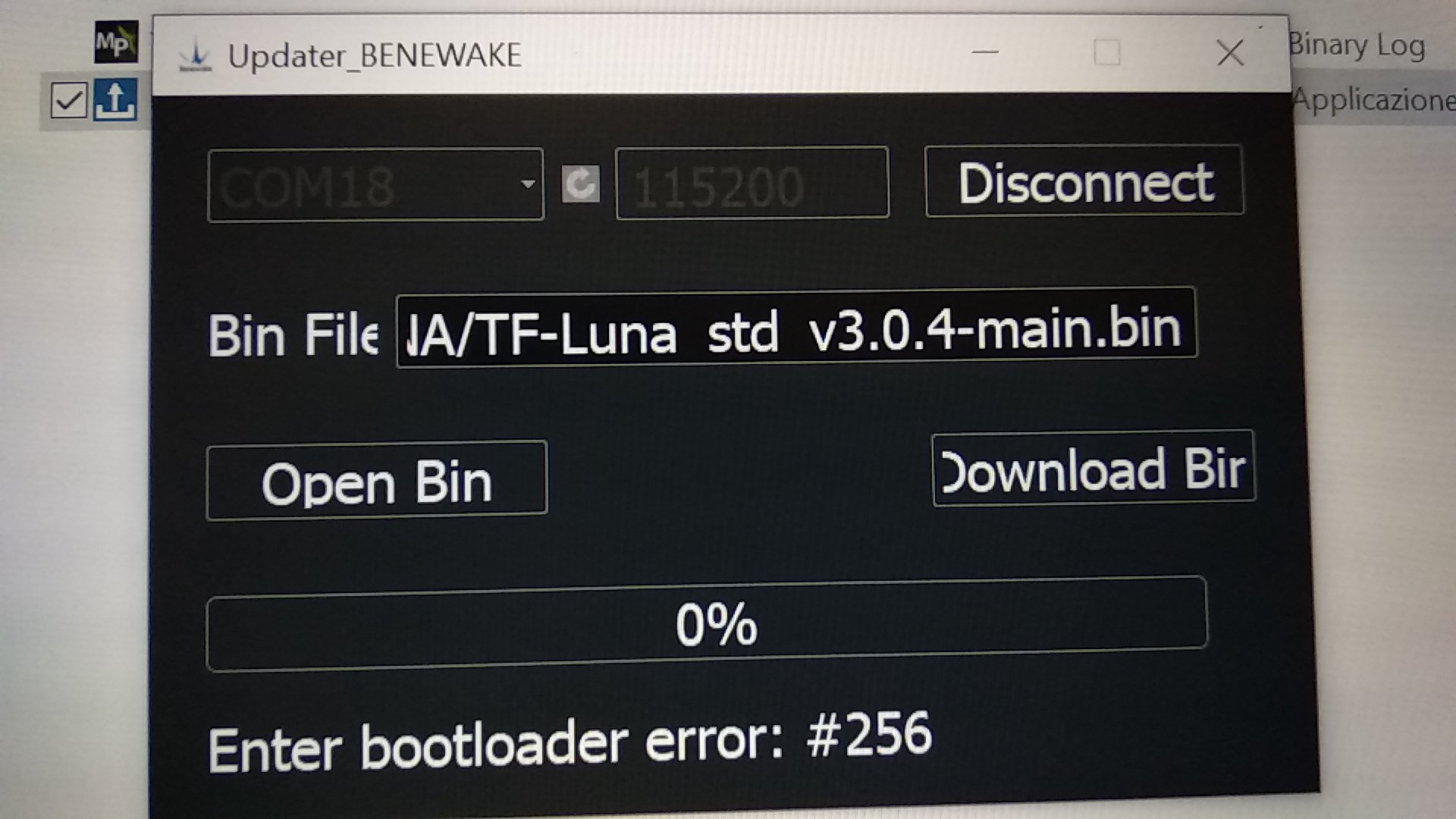
But works well
TF-Luna: http://en.benewake.com/product/detail/5e1c1fd04d839408076b6255.html
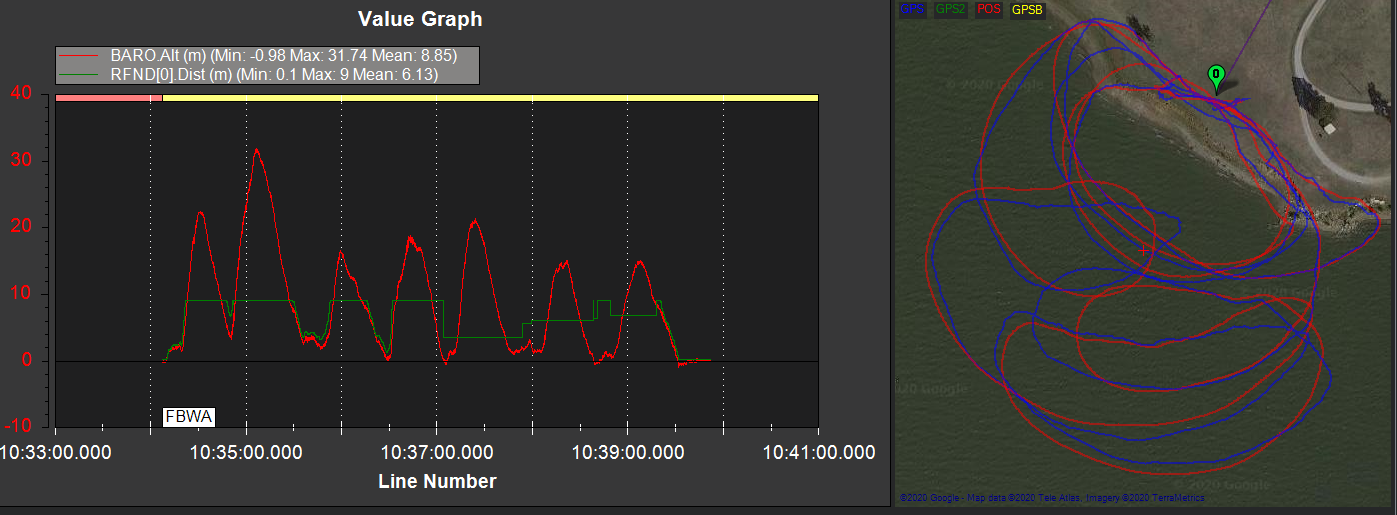
I’ve also flown some tests over water. Predictably, the results are marginal. LiDAR cannot deal with water.
The first three approaches over land as a baseline. LiDAR readings look good there. The next three approaches are over water, and the data are less usable. Final approach is over land, naturally.
1 Like
Is there any way to know which FW is installed? With fw files in this thread I have error like above picture. Thanks [
@Siya
@ibrahimqazi
For every LiDAR there is a command for check firmware version, the command is mentioned in the manual. Or may be you share your LiDAR serial number I will check in the record.
1 Like
Thanks a lot Ibrahim, I tried to discover fw version with the GUI send command, but nothing happens. My serial number is in this picture. I tried also to update the fw but I get bootloader error (see pictures above this thread).
@ibrahimqazi
Hi Ari,
Thanks for the response. I really appreciate your ongoing flight tests. It’s always good to understand the possibilities and the limitations in particular of the sensors.
Can you give a note about the light conditions (e.g. cloudy, sunny, dusk etc.) of the test flights?
Why I am asking?
Experimenting with other “time of flight” type LIDAR sensors (like VL53L0X and VL53L1X) I found some of them loose a lot of their usable range in bright outdoor light conditions.
The first set of flights are in sunny conditions. Over-water flight is overcast.
I started out with VL531X. It works extremely well indoors, but provides little usable information outdoors in daylight. With the current setup I’m getting very usable results, as long as I’m over solid ground.
1 Like