@ibrahimqazi @dkemxr @amilcarlucas
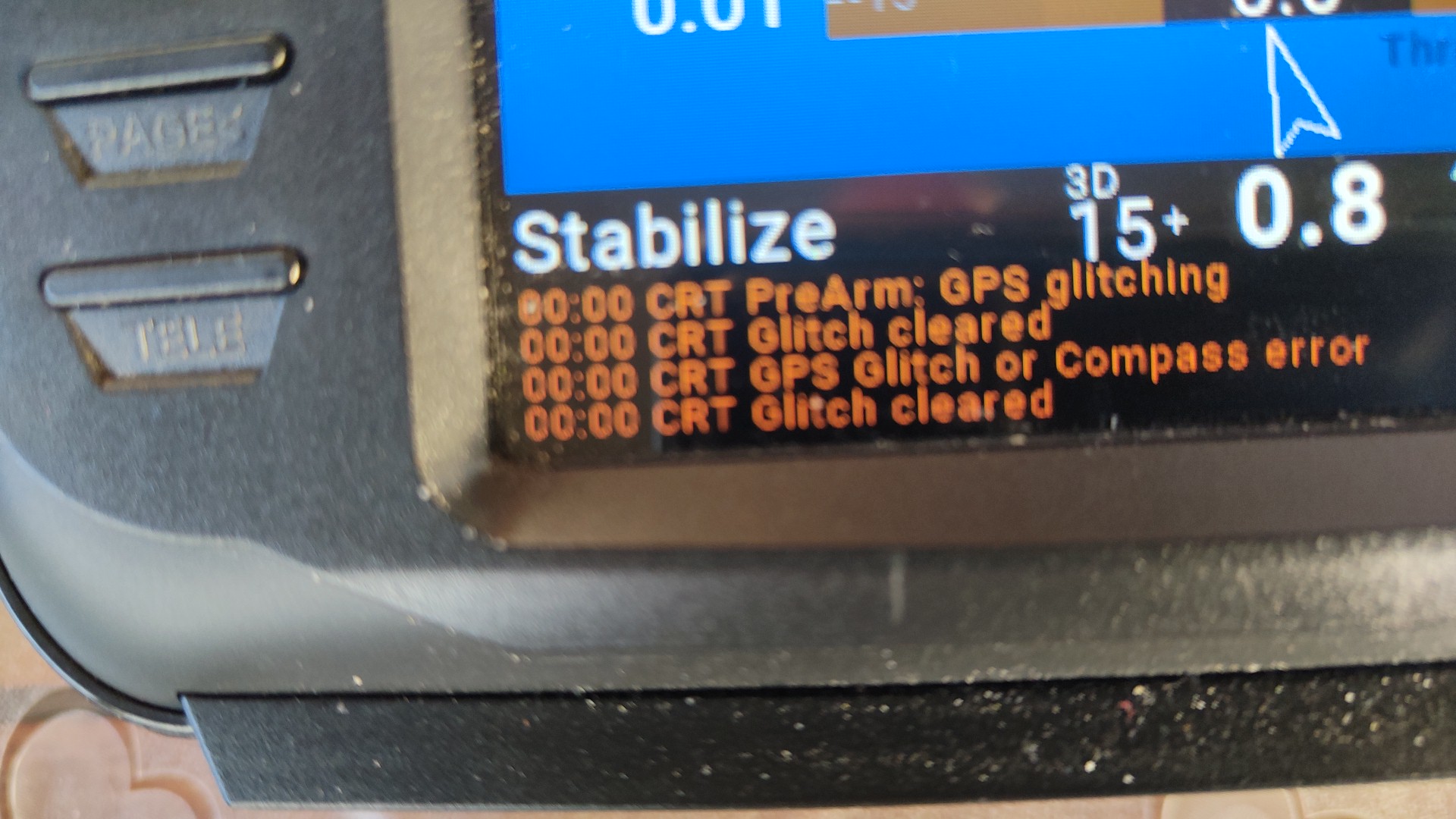
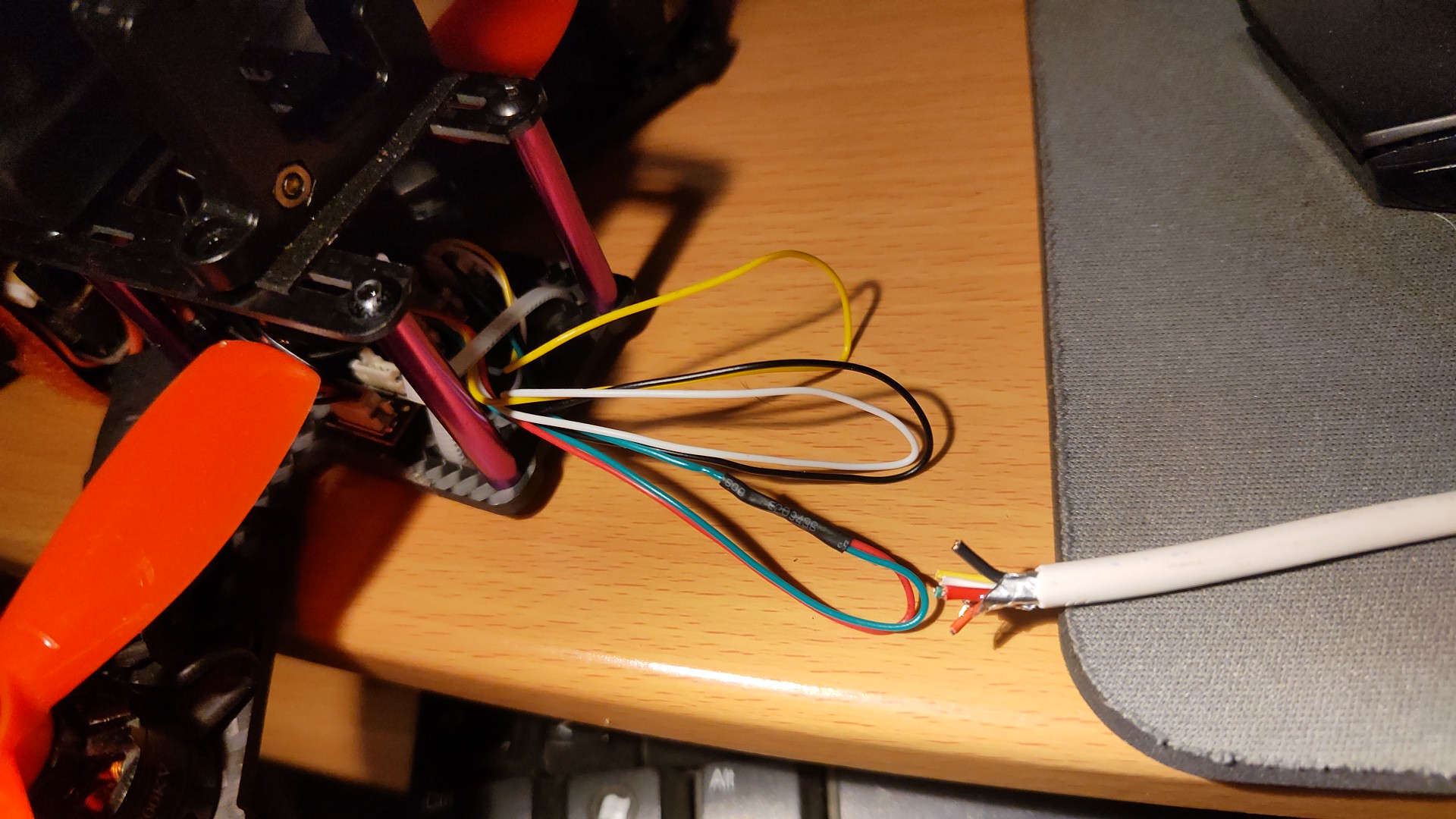
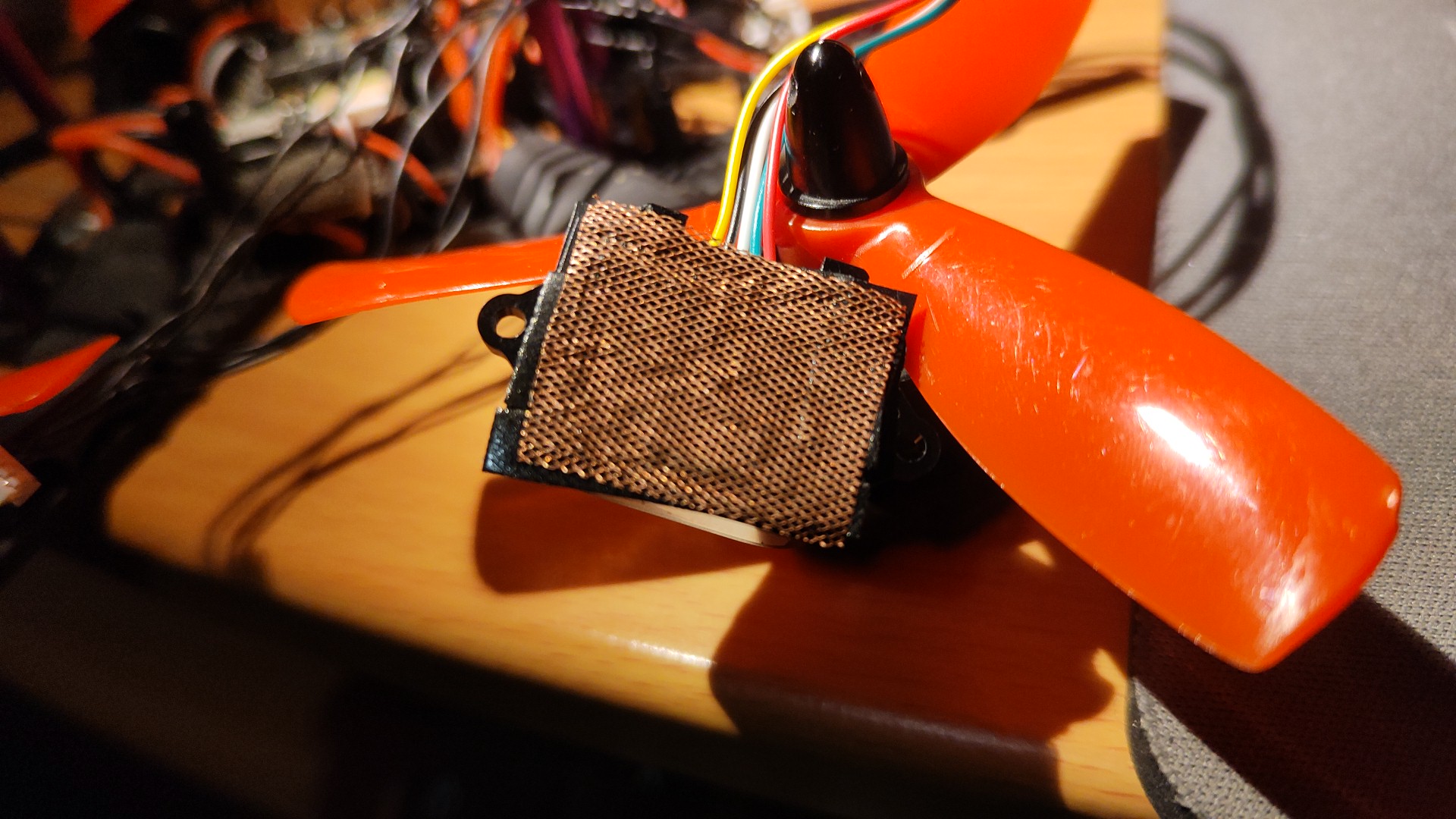
Hello everybody. i tried a double layer of copper mesh and lengthened the gps stand holder. Does not work. I interposed a further copper mesh layer but nothing. I laid the TF luna FC connection cables under the copter frame and finally the situation seems to have improved. I think I’ll have to try a very short shielded cable.

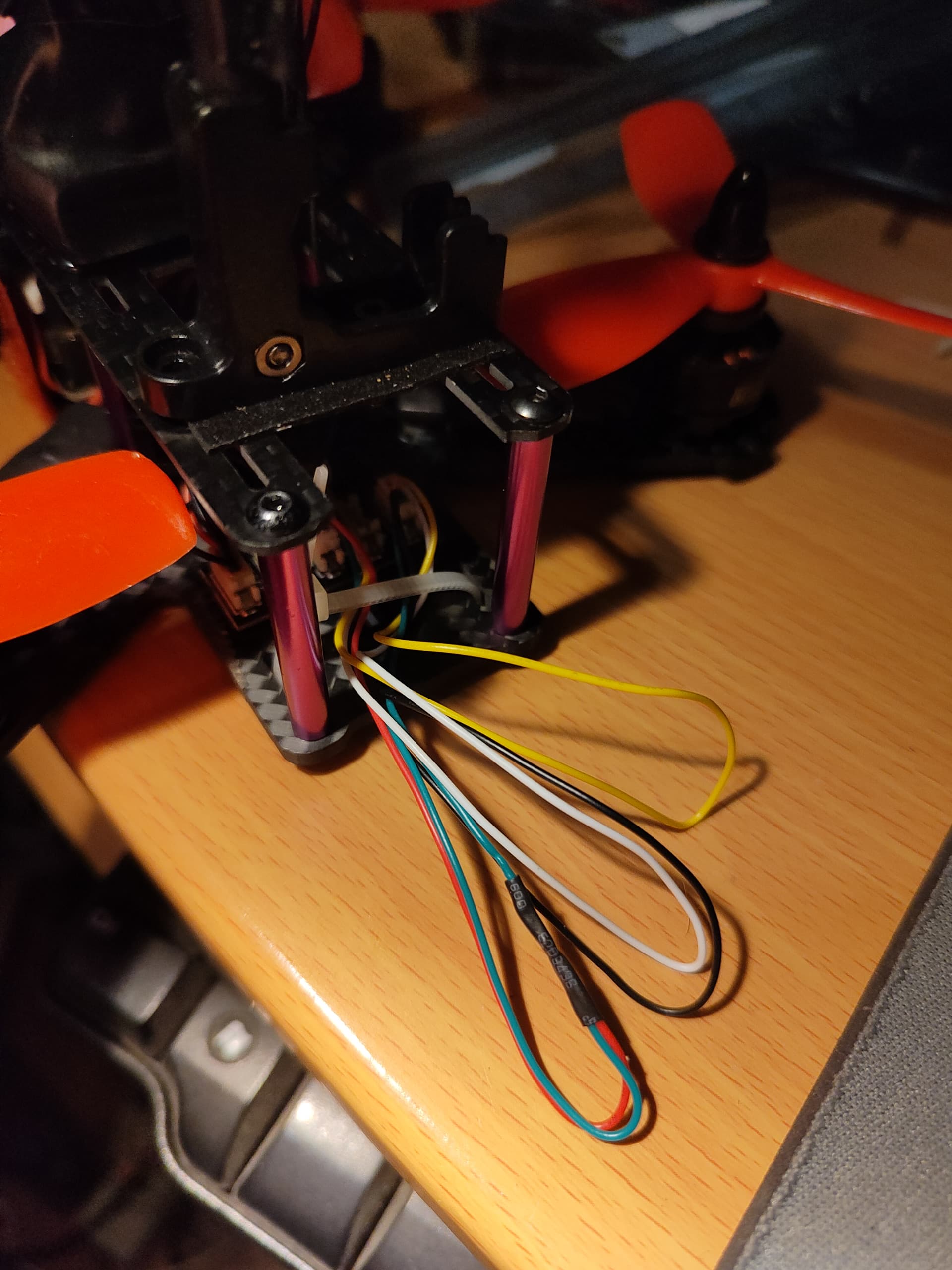
I have to replace these cables with shielded and short cables