A few weeks ago I had some great help in getting my copter flying, and flying well. I have been flying it now for a couple of weeks with a Sony RX1 RII and MicaSense AltumPT for agricultural research. But now, I have encountered a serious issue.
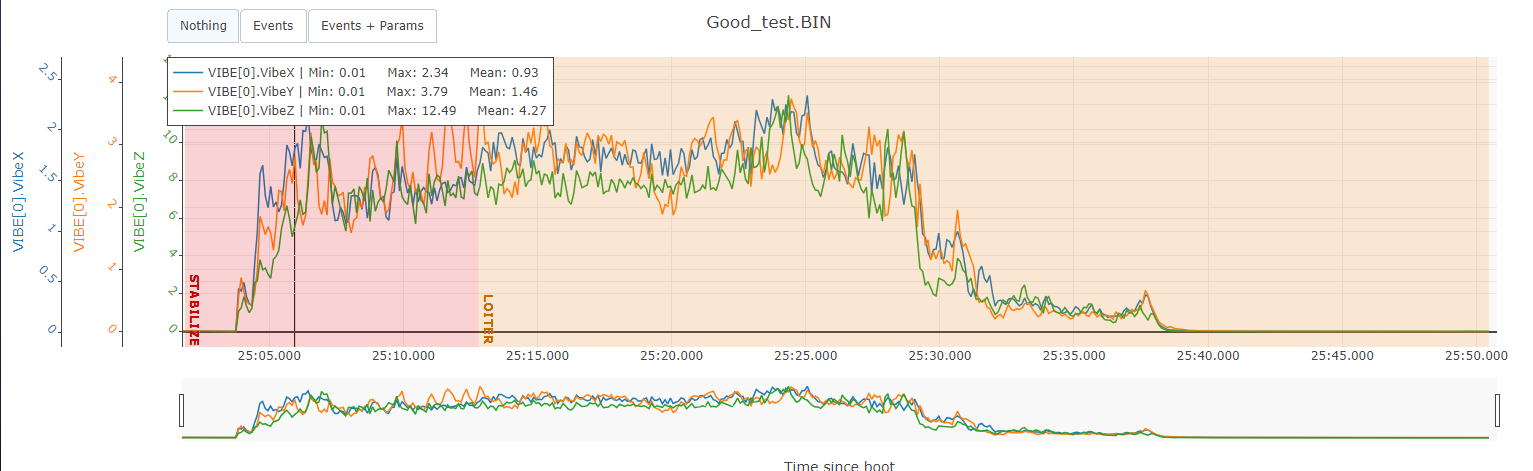
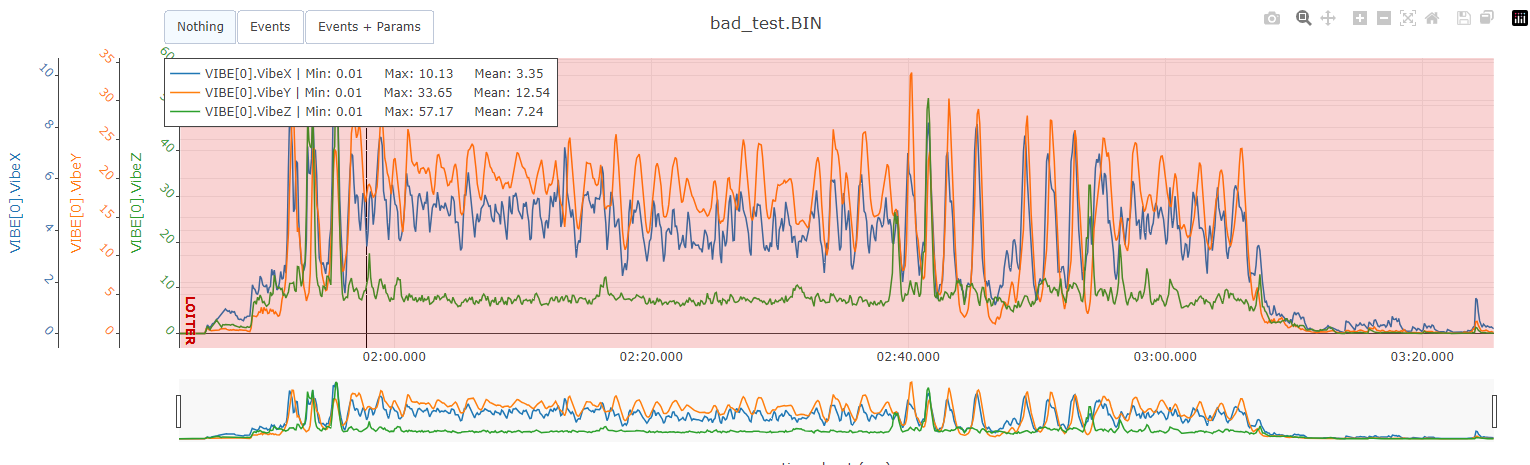
The copter used to experience low vibrations, with the z averaging around 14 and peaking to 28, but now I’m up in the 60-80 range regularly. The copter will also “bunny-hop” while in Loiter, meaning that if I let the sticks stay neutral it maintains position, but anytime I change the throttle level it will bounce a few times after releasing the stick. I’ve also noticed that the whole copter will sometimes twitch a little bit in the roll axis when just hovering in Loiter. These are problems that occur with and without a camera mounted.
Things I have changed since it was last flying well -
Tightened all the screws and added screws in the arms where some were missing. (I have since tried to loosen screws, didn’t seem to fix it.)
I added a broadcast remoteID module to the bottom plate, well out of the way.
Adjusted the arm folding mechanism to be more rigid when unfolded.
Ensure props are well and tight.
Took away unnecessary standoffs. I added them back.
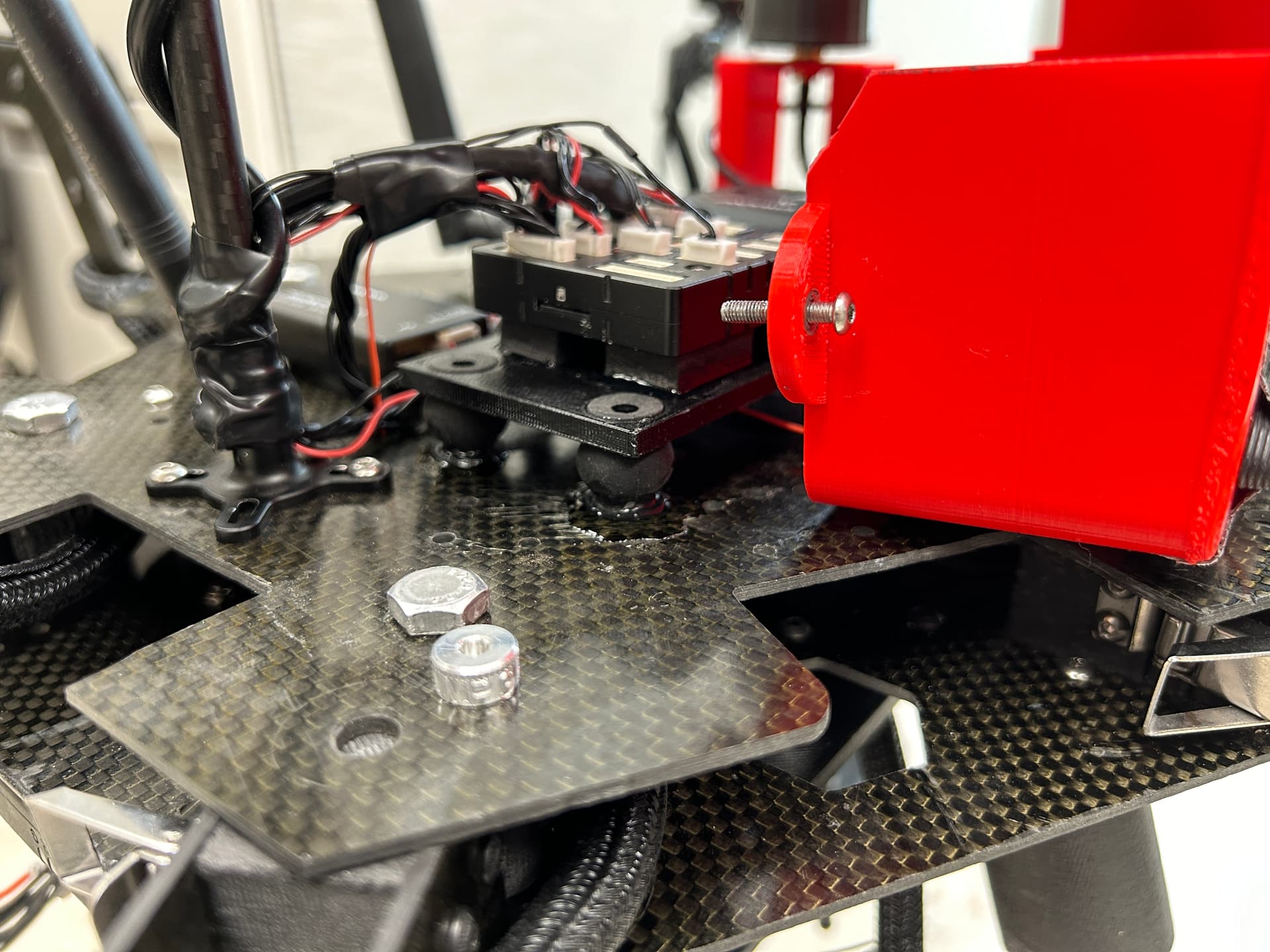
Made a new dome cover for the FC, instead of a cardboard box. (I tried putting the box back, didn’t fix the problem).
Made landing gear more rigid, less wobbly.
Removed a rangefinder that wasn’t being used. (Wasn’t enabled before either).
I am at a loss. I need this drone to fly well this season, and I can’t figure out what the problem may be. Motor 1 and especially Motor 2 become hot to the touch after short flights.
If only motors 1 and 2 are hot that would be my first area to investigate.
I would try and measure the current at a set value for each motor (using motor test page) and compare motors 1-6 ( if motors 1 and 2 are different then inspect or replace.)
Unfortunately I don’t have any current monitoring on the craft. My power module is capable of it, but having a 6in1 ESC made me need to connect it directly to the battery.
Doing the motor test, all motors spin at the same RPM, sound similar, and seem to have similar torque.
Not sure of your exact hardware but I suspect you could put the current monitor ahead of the 6 in1 esc. and it would monitor the total current consumed by the 6 in 1 esc.
Another idea would be to remove the props and check the vib graphs in real time for each motor (with this method I found 1 motor had bad bearings).
@xfacta can you advise anything related to the tune?
Unfortunately, due to the way the PM07 module is, I don’t think it could handle the current through it’s main PCB.
I thought I had solved the problem by removing some standoffs that I had added in between when it flew well vs when it didn’t. I had a great series of flights earlier today with relatively low vibes.
But now, I’m back to an oscillation issue. The drone will periodically wiggle in the roll axis in the air, going back and forth between motors 1 and 2. These two motors were quite hot after this test.
I have included the good_test.bin and bad_test.bin in that drive folder, which shows that after returning to the field I got an issue.
I’m going to see what can be done to get esc current telemetry going. I’m also going to double check all my wiring between motors and escs. But I’m not sure what’s causing this issue. No changes were made between the prior two logs, except for folding up the drone, returning to the office, charging up the battery, and going back to fly.
So you need do find the source of the vibrations. Its strange that some times it is ok other times its bad. What else could be different during these tests? RF interference? Battery voltage? must be something.
The PM07 can handle 90A continuous and 140A burst so I think that is within your requirements.
I think the vibrations are being caused by a motor not functioning the way it should. Perhaps a loose connection or something, which causes intermittent power loss or a short circuit current between two ESC leads? Battery voltage does get reset to full 4.2v/cell after charging, but I would be very surprised if voltage drop was an issue - it’s a 22,000mAh battery.
I would like to know your recommendation in regards to the PM07 - I have a 6in1 ESC. Should I put vbat into the input, and route all of the power through one pair of ESC pads? I thought that could overload it. My ESC has a CURR pad for analog current, and I just ran that into one of my power ports. I’ll see if I can get it calibrated correctly.
I’ll keep you updated on what else I find. I have MR30 connectors in-between the motors and ESC, and I think I’m surpassing that 30A limit. I can also try rotating the motors around, and then seeing if the problem follows the motors, or is stationary.
I’m tracking this down. I disassembled the entire hex, all wire connections look good. The motors are all connected properly, and ESC is receiving proper signal. And in fact, other than the oscillating spikes, the normal level of vibrations seems to be good (<15 in all axis).
What I’m coming to believe is that it’s a PID or other control loop issue. We attempted to re-do autotune, but only made it as far as Pitch+Roll before seeing the oscillation problem even more. The drone will fly normally in Stabilize mode for 3-4 seconds, then wiggle in the roll axis for a second, and then repeat the cycle. I have attached the video here: IMG_7301.mp4 - Google Drive The audio is helpful in understanding what’s happening here, I am not using the sticks to roll the copter.
I am not good at analyzing control loop issues much beyond doing Autotune and moving filters a bit, so any help here would be appreciated! This problem in general seemed to appear after going through the whole tuning process, and then re-tightening and adding missing screws in the frame. Before messing with the frame screws, the drone flew beautifully. Perhaps @amilcarlucas or @andyp1per , if either of you have another moment to spare to track this down?
Provide the .zip file with your intermediate .param files and I will take a look at it. Otherwise I do not know which steps you skipped, or performed incorrectly.
I added 3 missing files. The ArduPilot Methodic configurator will work better on the files now.
Please use version 0.2.2 you will get a surprise on start.
I will be doing a wokshop tomorow, but after that I can look at the .bin file
I just googled it to learn more, I’ve been editing my params via Mission Planner and a text editor. Looking forward to trying it out!
And I look forward to hearing your thoughts on my configuration. I may reset to default tomorrow and got through the steps again using your new configurator, we’ll see.
I have done a lot to try to track this down. I used my saved config files, but took the whole configuration back before the “First Flight” setup steps in your blog. That way I could go back to default PIDs and other rates. On default rates, my copter flies decent. The yaw and throttle controller are not great, so adjusting altitude or yaw quickly results in strong vibrations and some bunny hopping. But there are no rhythmic oscillations noticeable.
Taking it through the steps in the blog post, the copter flies more or less the same until I reach the roll Autotune. After doing the Autotune (which yields acceptable values for P), I get regular wobbles in the roll axis every few seconds.
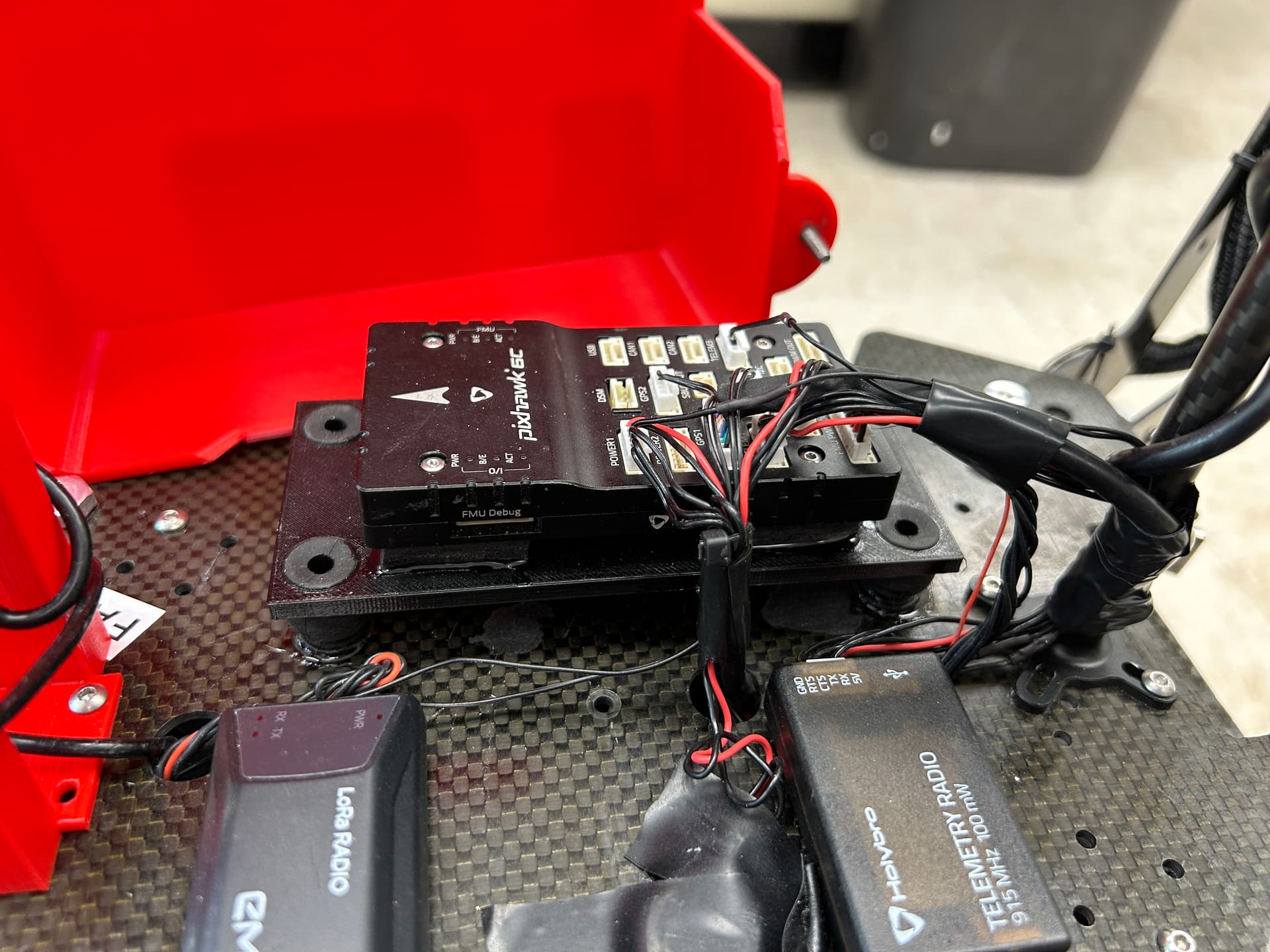
I have tightened all bolts on the copter. The landing gear is about as stiff as my friends’ S500 drone, if not stiffer. Wires are all secured near the flight controller. I went to this double-isolation method before to try to drop my z axis vibrations, but now I wonder if it is causing problems?
This drone was flying well at some point, but now I am struggling to re-tune it and get it to change altitude correctly (without oscillating up and down), hold level (without oscillating in roll axis), and have low vibes (all vibes used to peak below 20). I don’t know what else to do now besides try yet another FC mount. What else should I try?
These are log files before and after roll axis Autotune. The params I’ve provided to you already are my only changes, except this represents only going through file 22 and not all the way through autotune: Bin and params - Google Drive
Y axis vibes always quadruple after tuning roll axis. Consistent with the oscillations from the video I posted earlier in the thread.