New release with tons of new features and improvements.
Mainly improved user friendliness. User Manual is mostly updated with the new features.
One of the big new features is the component editor:
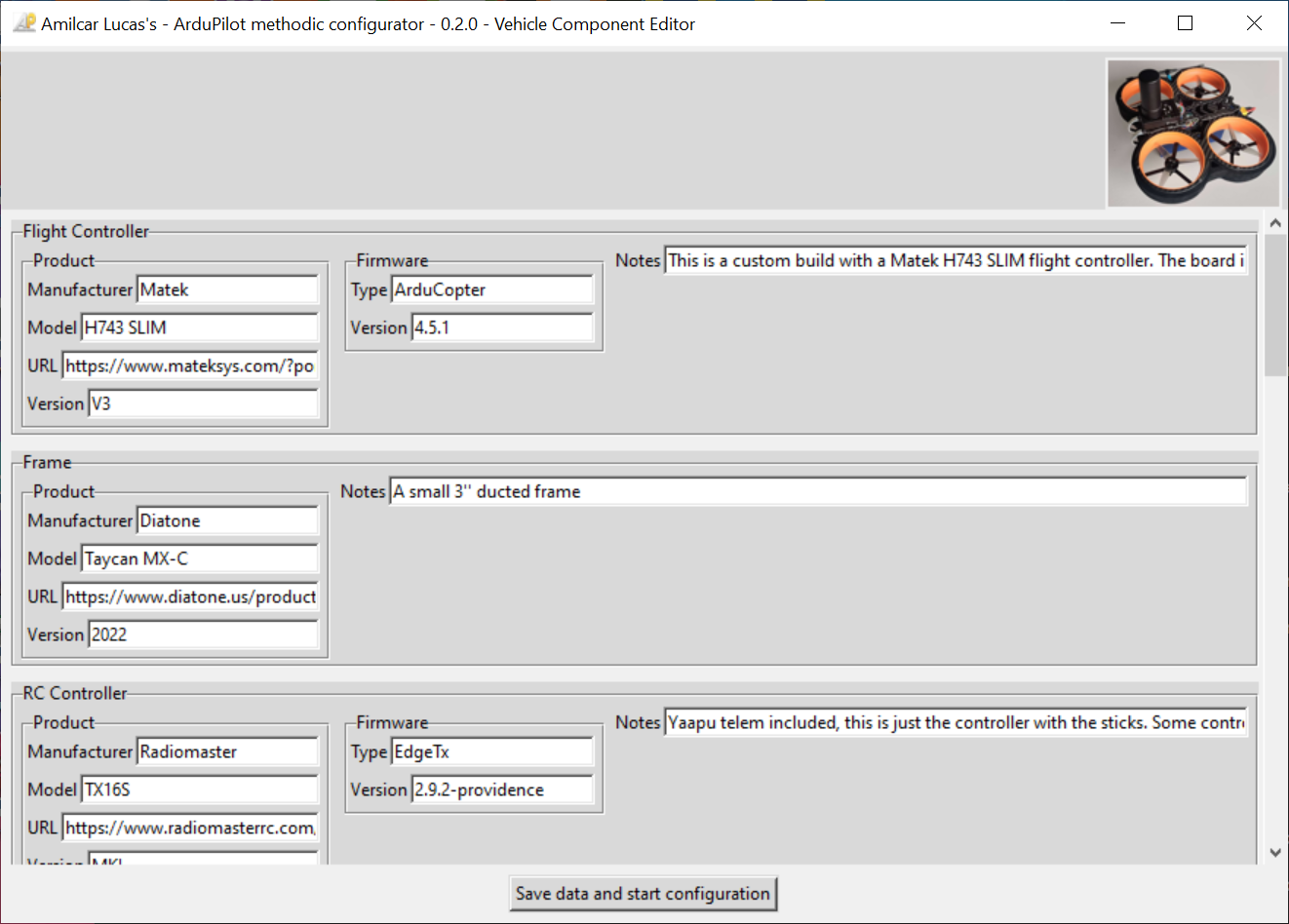
You can now store all relevant component information in one place
- Product
- Firmware
- Specifications
- FC connection and
- Notes
Basically this is the second part of Section 1, but on steroids ![]()