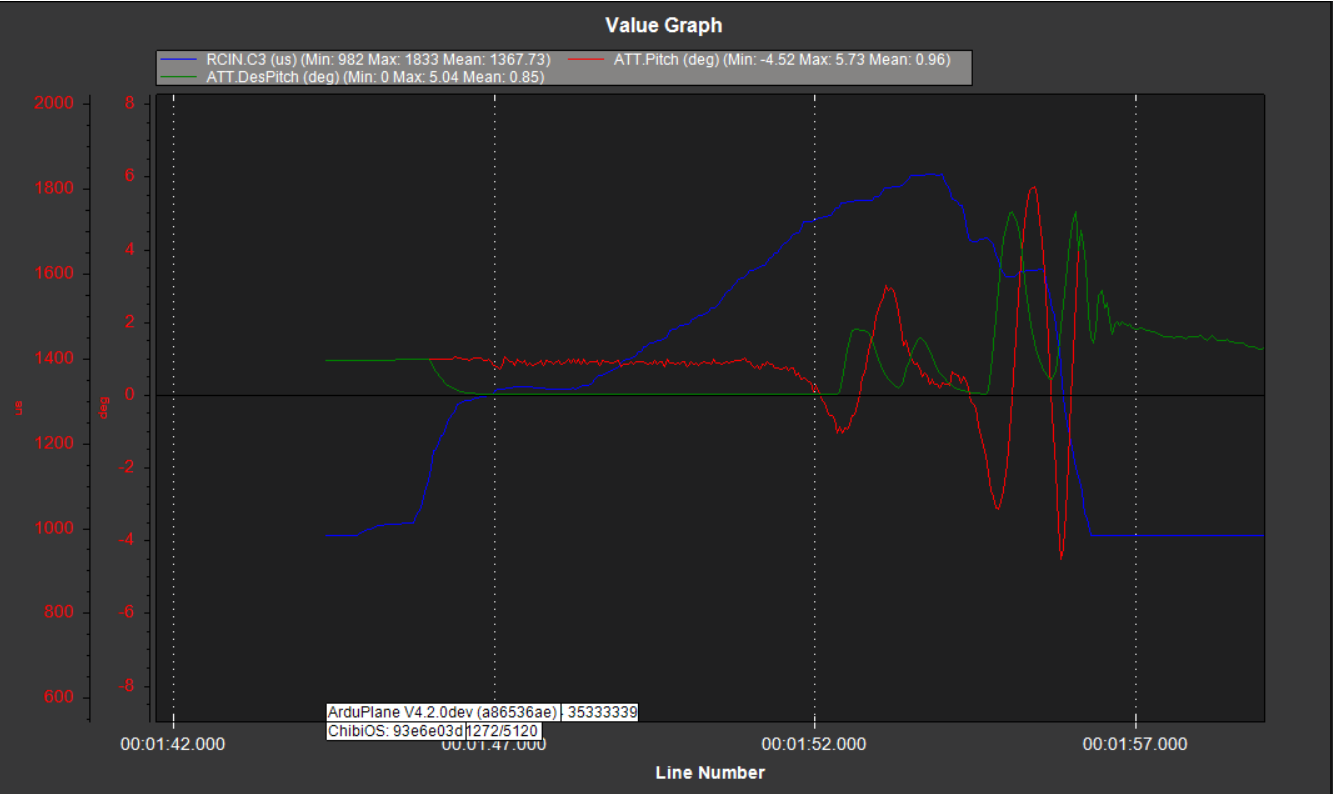
Here are the Pitch (red) and DesPitch (green) signals, with the Throttle (Blue) as reference. What concerns me is the magnitude of the pitch oscillation which grows to as much as ±5 deg, whereas the reference level was off at most 1 deg. The initial -2 deg pitching forward of the vehicle can be due to ground effect on take off. But why is the pitch oscillation amplitude increasing to as much as ±5 deg at the end?
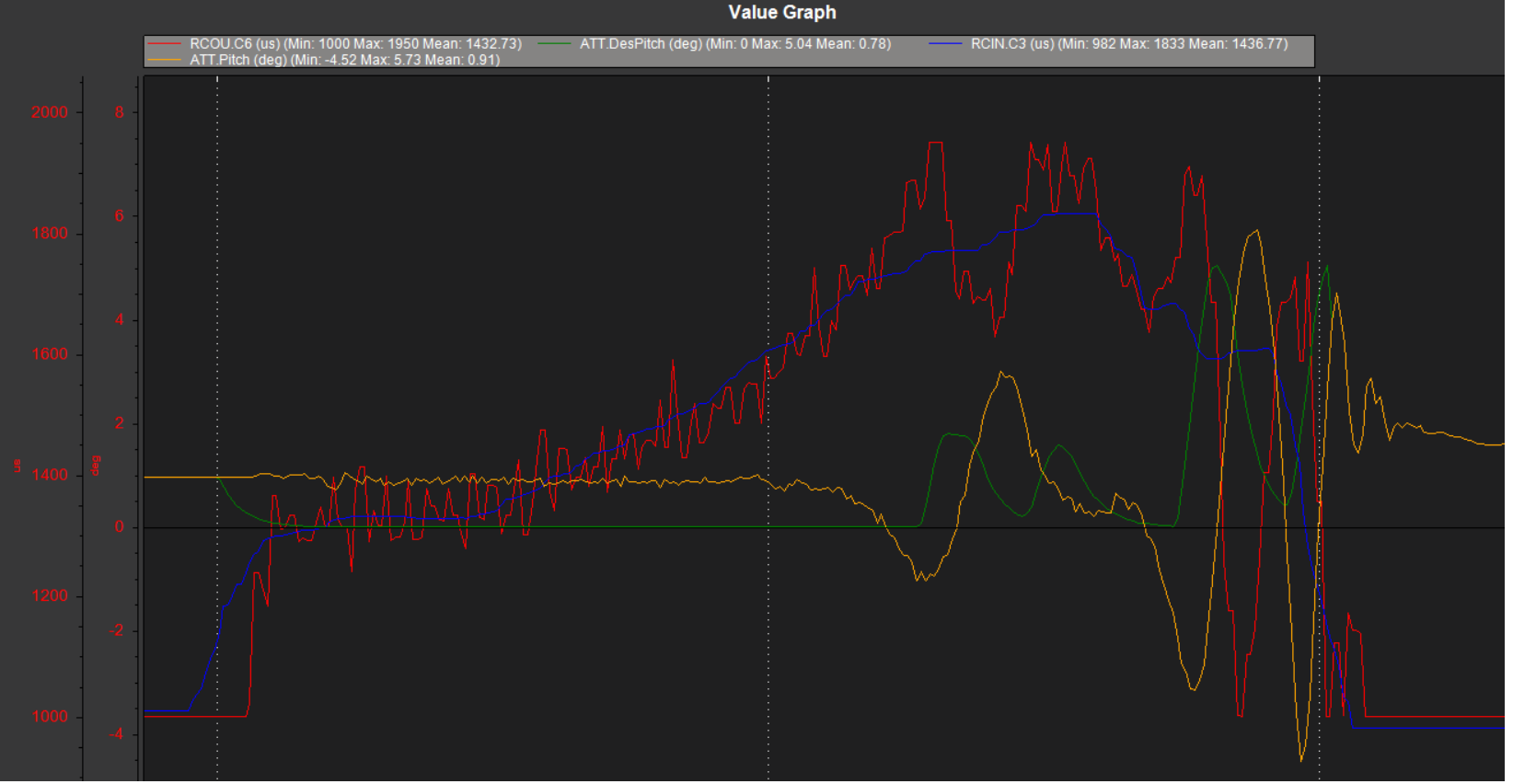
Here is the back motor signal (red), elevator signal (green), and throttle (blue). The question is if the short motor cutout at the end when the pitch is at its max oscillation is normal?
I think you’ll need more data to determine whether this was a PID tuning issue or just a result of pilot inputs and ground effect. Pitch is changing pretty slowly for this to be a PID induced oscillation.
Hi Mark,
Because the vehicle weighs so much it has a lot of rotational inertial which will make oscillations slow. I observed this in the PID bench tests. So this could very well be an oscillation in the Pitch PID controller. Also there is no reason to account for large (5deg) negative pitch oscillations when the level could only be off 1 deg max.
William
I have cleared up the apparent motor cutout mystery. The Back motor signal is inverted with respect to the DesPitch (elev stick). So the 3 negative going motor signal pulses correspond to the 3 DesPitch (elev stick) command pulses. So the motor is not cutting out, it is responding to the large up elev pulse given.
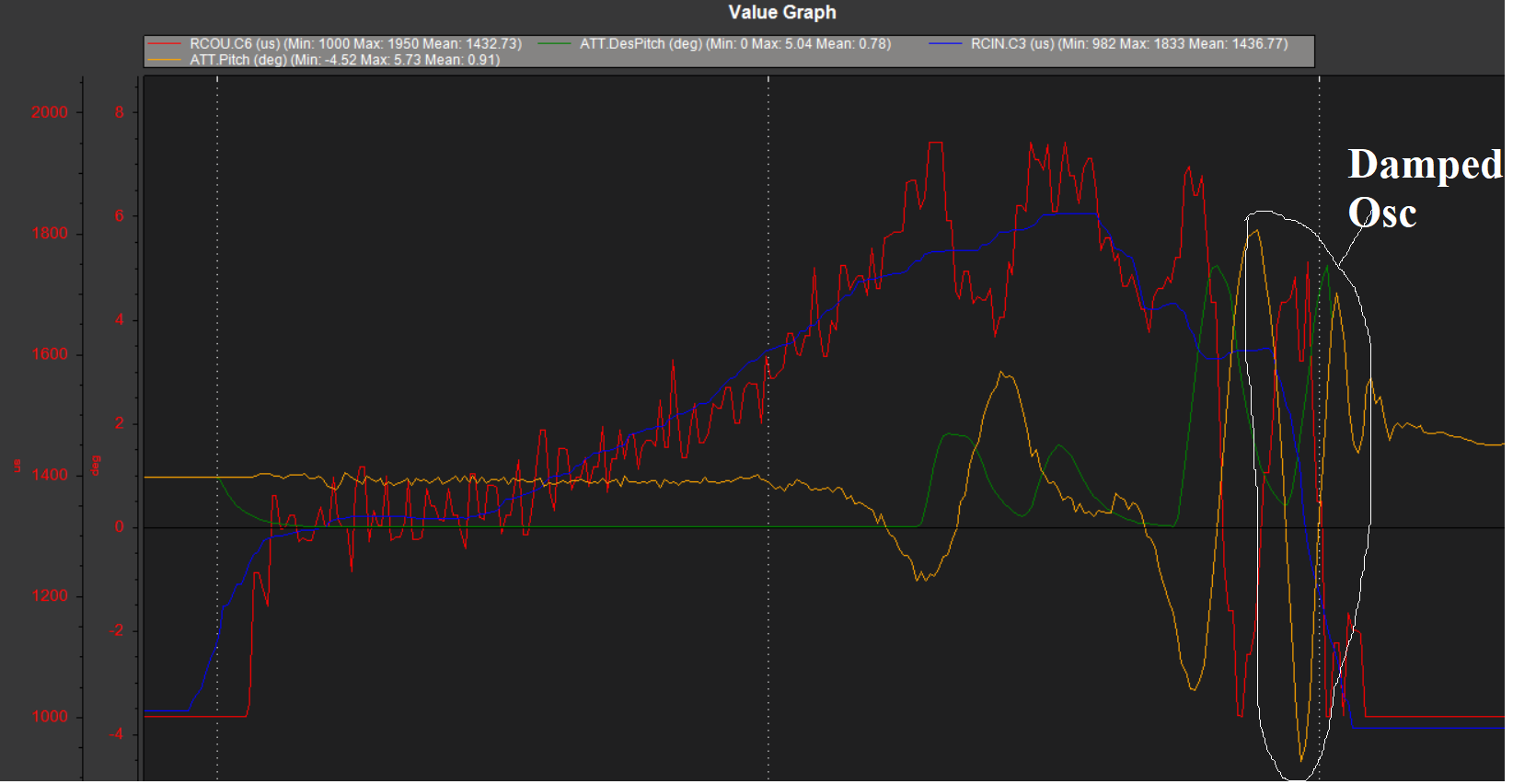
Looking at the Oscillation. It seems as if there is not enough D to dampen the corrective nature of the pitch PID controller. Every time a corrective pos elev command is given, the pitch responds, but it seems to take some time for the correction to stabalize, so it oscillate a little and damps out quickly. This can be seen in the last part of the pitch oscillation.
The motor signal above, which has the shape of the throttle (blue) and inverted elev signal (DesPitch, Green). The motors are what control the position of the vehicle. But the vehicle tends to oscillate up and down about its CG. So there will be a tendency for vehicle’s pitch (yellow) to oscillate after each motor correction change, which is what we are seeing above. So the pitch signal looks like an oscillator with the elev signal as it’s modulation. Ideally one would like to have enough dampening so that the oscillation converges quickly, but as we can see this is not the case in the system. We need more dampening (D) in the Pitch PID.
Hi all,
I have confirmed the problem is an oscillation in the Pitch PID controller. I tested the vehicle on the ground with the vehicle with on top of a small board under the vehicles CG, while the motors were on trying to stabilize the vehicle: Here is a picture of the Pitch and DesPitch signals and the throttle signal to show the duration of the experiment:
https://drive.google.com/file/d/1eIiaYVKV6pDqBYbeKkQNyDZgOEdidzr4/view?usp=sharing
Here is a log file of the experiment:
https://drive.google.com/file/d/1NLmSRTzsO8arLLzYkmTNljLwauK0bJtm/view?usp=sharing
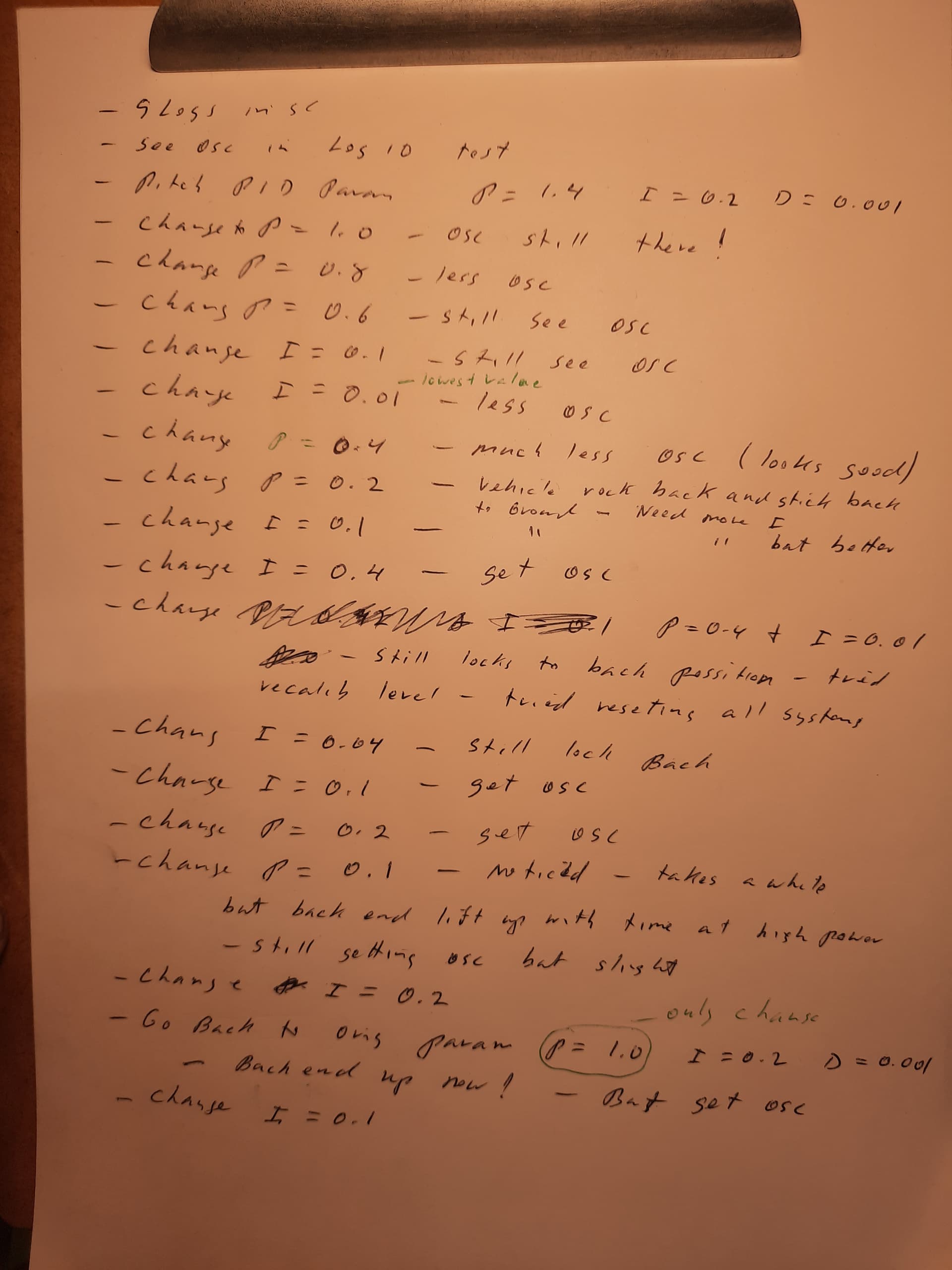
Now the question is how to get rid of this oscillation. I will now try playing with the Pitch PID parameters.
William
Have you tried adjusting the gains following the tuning procedure outlined in the wiki?
Your throttle is < 15% in the log, and IIRC you said hover power was 70%.
There could be insufficient thrust at such a low throttle setting to counter the inertia of the vehicle. Also, your pivot point is certainly not at the center of mass; how much force is needed to raise the nose or tail? That will hinder pitch control and would not be an issue in free flight or with a pivot point at the CM.
Hi Mark,
True, I am doing the test at low throttle when it is on the ground. But keep in mind I have got this to stabilize this way before and the vehicle flew well. So this method does work. When the vehicle is pivoted at its CG, I can move the vehicle up and down with my little pinky at the motors, so it does not take any force at all. When I jive the vehicle a little elevator the vehicle tilts immediately with a lot of force.
William
I assuming your just using an existing airplane model for this demo. One needs to input a custom airplane model to show a proxy. In turn this uses Ardupilot and will show any major flaws before you move forward.
@William_Walker
It looks like that’s a custom model in the RF editor.
Would you be willing to share it with us?
I assume it has the correct mass and moments of inertia, but I see the rear motor also tilts. Are you planning to do that with the full scale vehicle?
I created the full scale Vehicle design as a CAD drawing using 3DS Max 2018 software. Then I input the Model into Realflight 7.5. The Realflight model flies completely manually without any flight controller. This is possible since a full scale vehicle has a lot of rotational inertia and slows down the vehicle rotations enabling to make manual stability corrections. But it is difficult to hover in one spot without a flight controller. But once it is in forward flight the vehicle stabalizes easily and flies well.
I am interested in using ArduPilot SITL to enable me to use Mission Planner to stabalize and control the vehicle in Realflight 9.5. I have started by getting a Convergence Realflight model to work with SITL on a Windows 10 laptop. Mark Whitehorn also gave sent me a SITL PR that enables the Convergence model in Realflight to fly forward by tilting only the front motors, using elevator stick control, and not the vehicle body, which is better in windy conditions.
without setting up a custom airplane model sim the above test is not valid.
Yes needed to get a real idea what going on via a sim. For an example loading a FBX and assigning let say the YAK will let you fly but will not be a proxy of the imported FBX.
Hi Mark,
Giving out the CAD model might be a problem since we are forming a company to develop the vehicle. I will have to check into this. The RealFlight model was developed many years ago and the design has changed a little since then. The nacels got longer as did the body which enclose the props. This improved the efficiency by keeping the front motor thrust from hitting the vehicles wing. Also as you noted, the vehicle now uses the front motors to yaw the vehicle in VTOL mode. This was done to make the back end lighter. But as we test, the design will continue to evolve.
William
I am making progress on reducing the oscillation by playing with the Pitch PID parameters. But I don’t think I will get rid of it completely because some of it is created by ground effect. The problem is that the back motor thrust under the vehicle is creating a slight vacuum as the gets near the ground. So this pumps the oscillation. Also not all the back motor thrust goes out under the vehicle and some of it bounces off the ground and gets traped underneath. But as the vehicle tilts forward, the more of this traped thrust escapes under the vehicle. This also pumps the oscillation. But once the vehicle is on the air these things no longer become an problem. I notice this in the good flight. The vehicle wobbles a little as it takes off, but smooths out a lot once it is in the air.
https://drive.google.com/file/d/1csnLLtug1sz9msU4BM_flKp9pHXlquIa/view?usp=drivesdk
There’s a prearm check to make sure the log is running:
https://ardupilot.org/plane/docs/parameters.html#arming-check-arm-checks-to-perform-bitmask