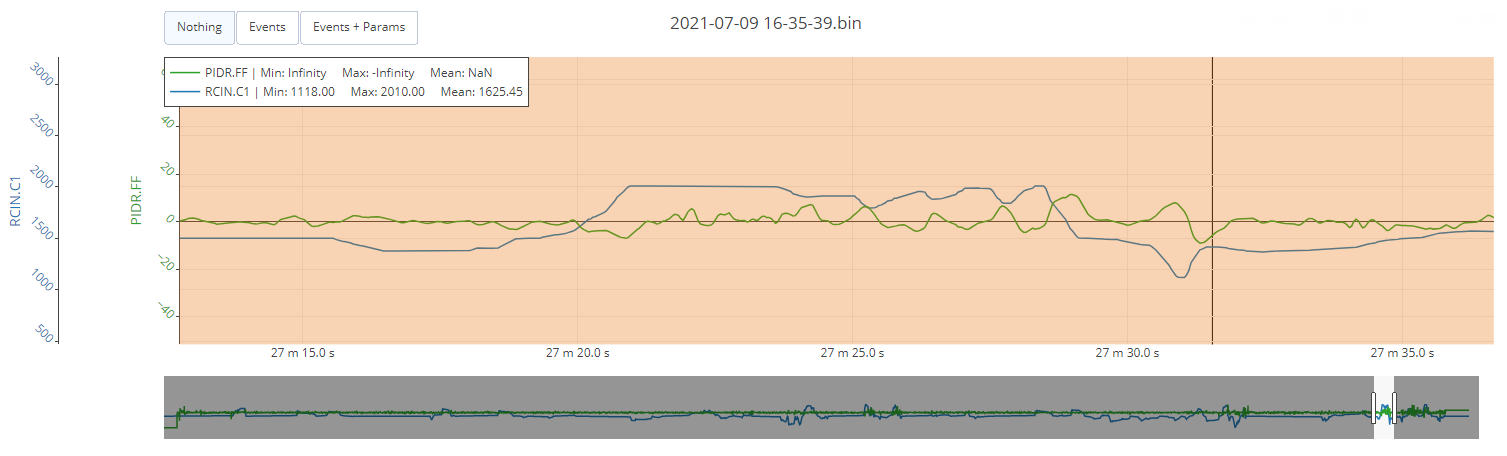
I’m not sure to understand what does it means in @tridge comments of the release Luckily you can read the right FF value from any log where the pilot has commanded a sustained rate in the axis of the FF (eg. commanded a full right roll, or pitch up). If I look my log after an autotune flight: try to visualize Max Roll with FF parameter
’
(logs are already posted in Autotune plane: need help > desired Roll and achieved Roll )
Kind regards.