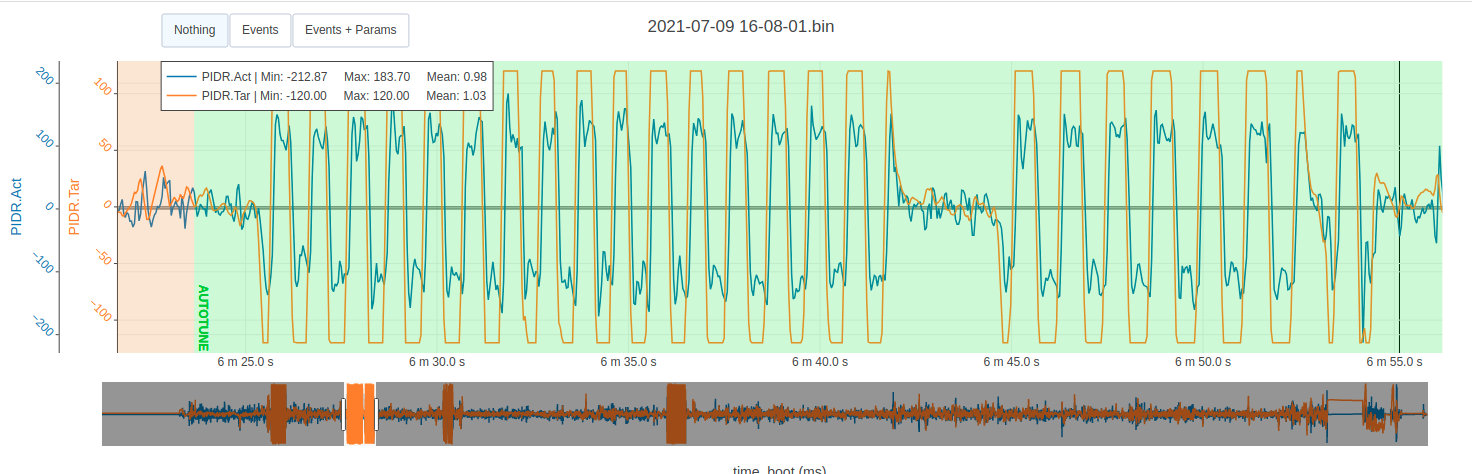
@Tridge: I post the wrong log file. Log with Autotune is this one: https://www.dropbox.com/s/q0899kbzdj342ps/2021-07-09%2016-08-01.bin?dl=0 . The log I posted previously is the flight after autotune.
@Tridge: I post the wrong log file. Log with Autotune is this one: https://www.dropbox.com/s/q0899kbzdj342ps/2021-07-09%2016-08-01.bin?dl=0 . The log I posted previously is the flight after autotune.