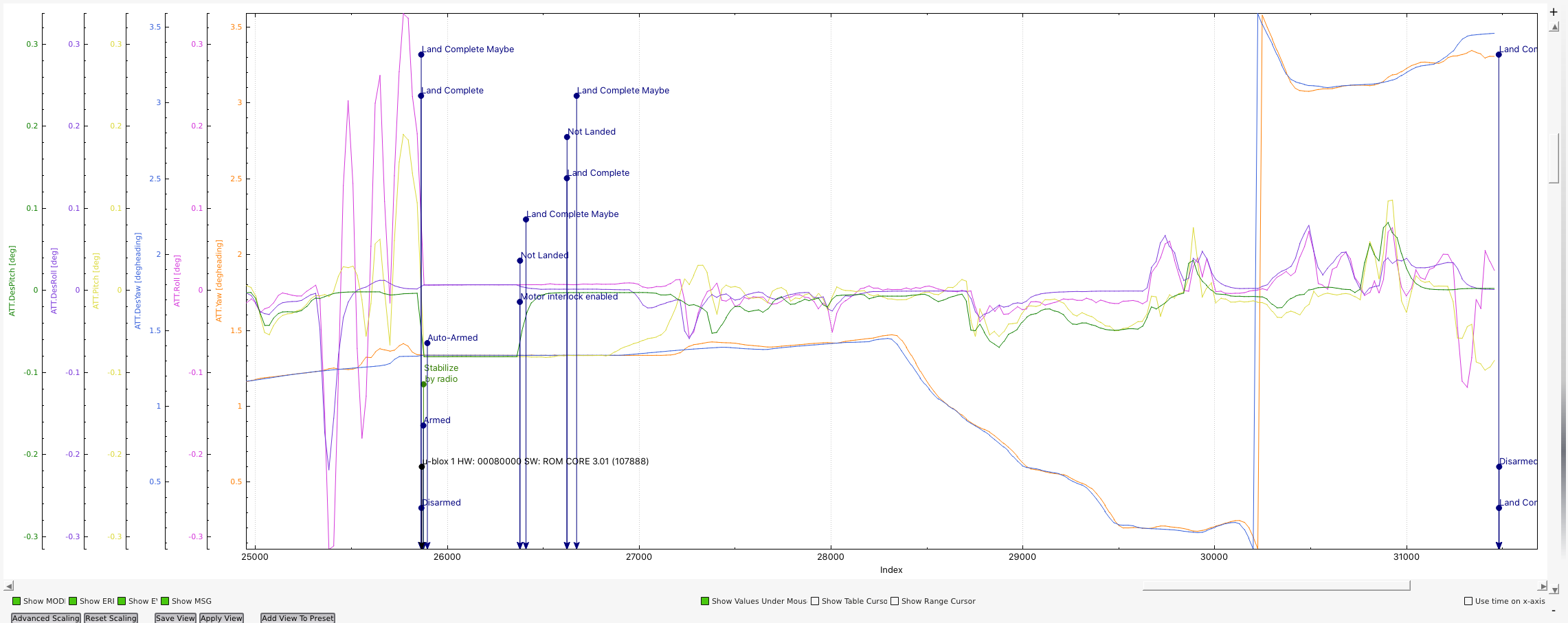
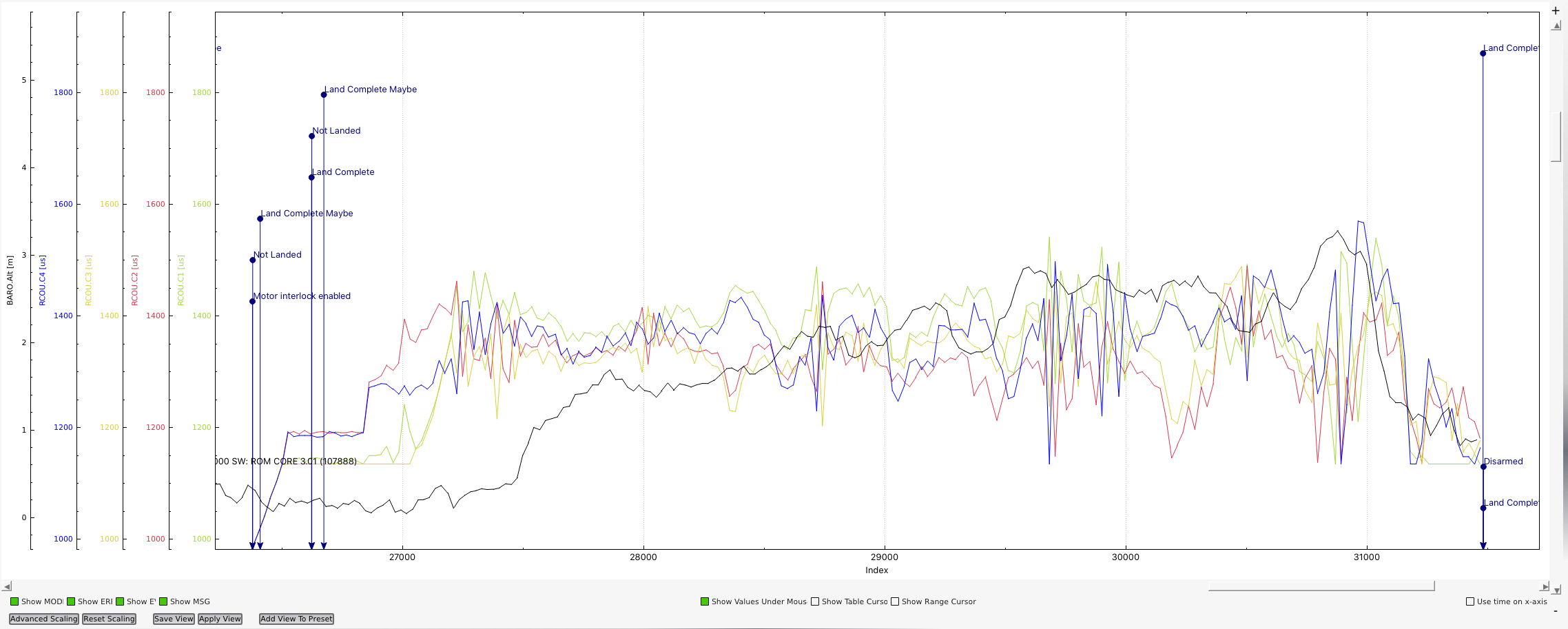
built a 600 quad from scratch and took it out on a test flight yesterday. All fine so far, but I’ve had two soft crashes/hard landings after tilting too hard in one direction and the drone not recovering fast enough. I’m coming from smaller drones and Betaflight, so some help in analyzing the logs would be appreciated.
I didn’t want to AutoTune, since it was rather windy at times, but maybe AT would resolve the issue?
You haven’t said what size props you are running but I notice you are running default rll/pit filters in ATC_ but I would have thought a 600 quad would be running at least 15".
Also it would be worth adding some weight as the quad is quite light/overpowered.
Soo… props currently only 13", you think I should replace them with 15"?
Regarding weight: I’ll add a gimbal+cam, but that won’t add too much. Maybe a bigger battery too?
I’ll go through the tuning tutorial, thanks for that. Then I’ll do an autotune.
With 700 kV on 4S, 13 inch props should be the top limit on what your drivetrain can handle. I woudn’t go for a bigger prop, because motor response would lag behind what the autopilot wants, due to increased propeller inertia.
The best result (maneuvrability and sharpness-wise) I could get from a 710kV/4S combo was using 11x5 Graupner Electrik props. Best flight-time was with 12x3.8 APC slow-fly carbon copies.
But that was back in the age of 8-bit ESCs. Didn’t test on BlHeli_32.