I followed some how-tos for nmcli but without success.
Please, do you know how to use it on a standard rpanion-server? I mean, create a simple ad-hoc network between two RPI running rpanion-server without dhcp?
If you don´t know, please, could I disable nmcli without damage for rpanion-server?
Is there any reason you can’t use a AP<-> Client instead?
I can have rpanion-server disable the network config GUI if nmcli isn’t active. Probably a good idea so users know if there’s some issue with the nmcli config.
Yes, can can connect over ethernet or any network connection available on the Pi. You’ll need the Pi’s IP address (will depend on your LAN configuration). It’ll be at port 3000, ie http://192.168.0.200:3000
I am assembling some quads to fly in formation and do other collaboration only when on radio range. They will get and lose communication between them, and no one will be more important than any other. A central AP is also not an option. So, pure ad-hoc communication suits better.
I removed Rpanion-server from the quads only because of the network setup. I prefer to stay using Rpanion-server due to many features.
Is it possible to set this kind of network with the Rpanion-server?
@brunoolivieri Yes, whenever I make a change in the settings like adding new udp port or starting video stream, zero cpu goes 100% and the telemetry would stop and loose connection. I have to go back and stop-start it to get things going.
The video streaming also stops for the same reason. But the CPU drops back, it doesn’t stay on 100% forever.
@stephendade Thank you. I can access the rpi from the other network. Also, I tried the same through the ethernet though static ip.
The video doesn’t stop any more on 3B+ and thing works fine with ethernet connection but problem do exist when I add additional wifi adapter. The telemetry connection keeps on loosing & connecting. It not working with external wifi adapter. I tried alpha adapters (Ralink8812) and also on AR9271. same problem.
@stephendade When I add external wi-fi, Pi’s wi-fi also misbehave. The pi hotspot won’t assign IP while connecting, I reboot the Pi 2-3 times, it may or may not connect.
Also if I add the adapter at another port (the base one), Pi wifi connects fine ann assign IP too. But when I check the web ui panel…the flight control “connection status” keep getting lost & connected for first few seconds and then it will be lost forever. And their is no coming back.
That indicates a failure of the telemetry link between the Pi and flight controller. Given the only thing you’ve changed are the USB wifi adapters, I’d say those adapters are emitting RF inference (EMI) that is disrupting the telemetry link.
It does sound like there may be a hardware issue with the USB wifi adapters, rather than a software issue.
EDIT:
Have the USB Wifi adapters worked in the default Ras Pi OS installation? That might narrow down if it’s a hardware/OS issue or a hardware issue.
Hi,
it could also be a power issue. I had this or similar behaviour with my Alfa wifi adapters. After adding capacitors to the Rpis power supply and connecting the Alfa adapters to their own USB power supply with an USB y-cable, the telemetry connection and responsivness were flawless.
To clarify: One rover has both solutions the other rovers only have capacitors on the 5V GPIO pin, but they all work well.
The USB wifi works well with Pi os. As suggested by sebastian, I powered the wifi adapter separately. Below observation is on rpi zero. Will test soon on pi 3b+.
Things look stable but still facing two issue:
The video stream gets disconnected after some time automatically. Tried all resolution settings…it happens after say 10 min or 15 min…randomly…i then have to go and restart it again.
The telemetry I am receiving is lagging…jittery if I may say…not fluidic…like if I move the compass…its not smooth movement on QGC and also seems laggy. This accentuate if video is working parallely.
I checked on rpi 3B+. All good. no problem with video dropping.
How can we troubleshoot the rpi zero like why the video stops after sometime. I checked the ram by ssh and its over 100mb all the time (200mb free), so its not the ram issue and the cpu usage is around 70% at 1280X720.
I’ve done some testing of Rpanion-server 0.7.0 on a Pi Zero. I’ve found that the telemetry baud rate needs to be reduced down to 460800 or less in order to have a stable video/telemetry connection.
At 460800 baud, the Pi Zero can run for hours without issues.
The Pi Zero doesn’t have the performance to smoothly do higher baud rates + video + managing the wifi.
It could be a power supply issue. Have you checked that your power supply is not sagging at higher currents?
Sagging is where a power supply’s voltage goes below the rated voltage at high currents. The Pi can encounter stability issues if the supplied voltage goes below 4.8V
Hello
I am new in this forum.(sorry for my english)
I installed rpanion-server on Raspberry zero. Mission Planner video works. But I can’t get a valid ip address for telemetry. Could you please help me, which IP I should set to connect to UDP port.
thanks
To receive the telemetry on the mission planner, you should insert the Windows machine’s IP that you use with the mission planner.
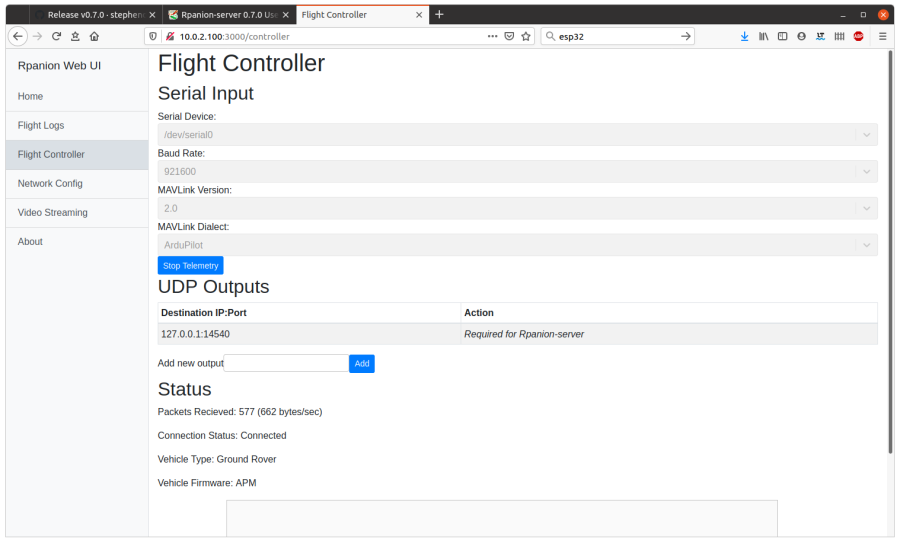
For example, check this image:
Instead of 127.0.0.1 you insert the IP of the Mission Planner’s machine (ie: 192.168.0…). The port you can choose any, 14540 for instacance.
On Mission Planner, you choose UDP connection and inform the same port.
Just in case: You must check if the Rpanion-server is correctly connected to the autopilot board (tx/RX). Thus check if you are using the same baud rate in Rpanion-server and Ardupilot serial port baud rate. You can see below “status” how many packets were received from the Ardupilot by the Rpanion-server.
Hello
I am registered with Missions Planner on the rpanion via wlan. Thought I don’t need my own WiFi network in addition. I’ve always tried 10.0.2.100. Do I always need an additional WiFi? At Apsync I had registered with Rasperry.
Thanks for the help.