marblecreek
(Rover; AP 4.6.0-BETA, Pixhawk 6X CM4)
122
Today’s param file - coming together - throttle servos are slow to respond - left/right on the throttle stick (left gimbal on rc) and they seem normal. Fore/aft on the stick, each servo moves at about 1/3 speed. I’m sure I’ll find it, but if anyone knows the exact config, save me some time. Then, I buy the BBQ (like I did for Steve!).
I would instinctively check the voltage and current producing ability of the servo power supply. Low voltage would make them slow. Measure the voltage of the supply as you actuate them. If the voltage drops a lot as you actuate them, it probably means the power supply can’t produce the current (not big enough).
I don’t know of any parameters that would instruct the servos to move slower.
1 Like
marblecreek
(Rover; AP 4.6.0-BETA, Pixhawk 6X CM4)
125
Yup - 24v input. It’s interesting, the delta between control vectors of the gimbal. Left/right is speedy; fore/aft slow. I’m gonna check my xmitter later today. Thx for the tips!
The fact that the left and right is normal speed which moves both servos and the throttle (speed forward/reverse) is slow, tells me it is probably not a voltage problem. I didn’t know about the slew rate parameter, which only controls the speed of the throttle. My MOT_SLEWRATE is also set to 100 and my forward backwards speed control is slower than the speedy left right steering control. Mine works fine this way, I guess I don’t need snappy throttle response.
I can’t tell if this only applies to manual steering or if it also affects automatic control.
1 Like
marblecreek
(Rover; AP 4.6.0-BETA, Pixhawk 6X CM4)
130
Thanks @SJohnson - always so helpful to know what others are doing with these micro-configuration settings. I’m working on fuel supply/vents today - should be alive to test under power again soon. cd…
marblecreek
(Rover; AP 4.6.0-BETA, Pixhawk 6X CM4)
131
When you were here, this was not the case - only started happening after an upgrade to the 4.5.2beta, and back to 4.5.1. I’m on 4.5.2 now and getting more stable day-by-day. Still not mowing though…Messing with FAILSAFEs today some…
marblecreek
(Rover; AP 4.6.0-BETA, Pixhawk 6X CM4)
132
I’m about to set up my fuel sensor. @Swebre2023 , I ordered a tank like yours - any tips for getting fuel sensing up/running? Also, sold my TR182…DM me the latest on your 180…
Spec says I have a 0-90 ohm fuel sender. I’m curious how to get resistance values into the Pixhawk. It seems I could measure the delta of volts passing through the resistance on an analog pin?
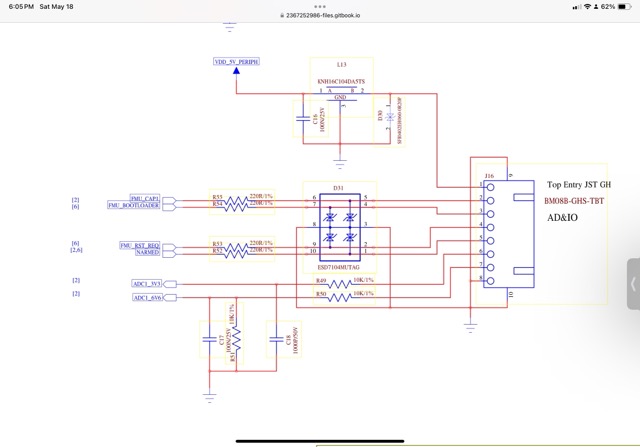
Found this on Holybro site: The Pixhawk6X has 2 analog inputs, one 6V tolerant and one 3.3V tolerant
ADC Pin12 → ADC 6.6V Sense
ADC Pin13 → ADC 3.3V Sense
Analog 3.3V RSSI input pin = 103
So, I think I’ve found my input - either pin 12 or 13 depending on the voltage. Will do a bench test on calculated v after 3.3 and 5.5v loads and actual throug the tank sender. Anyone see any issues with this approach?
marblecreek
(Rover; AP 4.6.0-BETA, Pixhawk 6X CM4)
133
Is it really this simple to wire? VDD_5V_PERPH thru fuel sender to pin 7 of the AD&IO connector?
marblecreek
(Rover; AP 4.6.0-BETA, Pixhawk 6X CM4)
134
Tuned servos today and spent some quality time with the linkage. Have one servo (right) that’s reversed so was a bit confusing at first.
Fuel tank plumbed and secure.
Mowed a bit close to barn with no issues!
Will put a mission together and try a test run one evening this week. This mower can’t come at a better time - temps in the 90’s!
Just saw your post. Excellent news! Looking forward to more pics and Vids. I’m not monitoring fuel levels but looks like you have it handled well. Might have to steal your idea…
Interested in the C-180? Will contact you shortly.
Again, Congrats!
marblecreek
(Rover; AP 4.6.0-BETA, Pixhawk 6X CM4)
136
Well, it was a banner day - ran the mower on a mission with great success. Will quickly (backup stuff) and move into tuning/mowing mode. Still need to clean up my electronic layout, and have some weirdness in the L/R servo movement being a bit over actuated compared to the Fore/Aft.
Problems in manual over steering has been going on with many mowers for a while. That is why they put exponential steering in firmware version 4.4 and higher.
2 Likes
marblecreek
(Rover; AP 4.6.0-BETA, Pixhawk 6X CM4)
138
Thanks Steve - I may have misunderstood how that setting worked - makes a bit more sense now - will check it out soon - working my mission planning now - seems like a whole new part of this world I need to learn! Anyway - couldn’t have gotten here without you - thought of you while running the servo calibration today - really, thanks a ton!
In the Rover Peripheral Hardware Section of the Rover Wiki there is a section on fuel flow and fuel sensors. Like @Swebre2023 indicated, it looks like you are on the right track. My biggest concern is putting excessive voltage back into that flight controller. It may require a voltage divider. I just bought an ultrasonic fuel sensor that gets glued/clamped to bottom of the fuel tank and it puts out an analog signal for a standard automotive gauge. If the ultrasonic device works, it will make things easy. However, I am skeptical until I see it work.
1 Like
marblecreek
(Rover; AP 4.6.0-BETA, Pixhawk 6X CM4)
140
I think I’ll ask the Holybro bros - see if they agree. It would be odd, to me, if using the output voltage would overload the sensing pin. I suppose it could, and I don’t want to be buying a new controller anytime soon… Will check back in when I hear something…cd
I just know my level sensor is hooked up to 12v, which would be too much for the FC, if the voltage on the wire intended to go to the meter has anything over (6.6v pin 8 - on Orange Cube), anything over the max for your AD&IO port, would be a problem. It is easy to check before you hook it up.