I use similar. Combo of digital relay boards and RC relays, but all of them just control higher current standard automotive relays (either the ones within the mower’s own electrical system, or some that I have installed for various subsystems).
1 Like
Moved my electronics to a different box that has a bit more room. Mounted my gps cards vertically, and plan to install a fan. Not sure if I’ll have EMF issues, but the cleaner install makes me happy. Happymodel folks are walking me through troubleshooting my servo. No gear issues, but the motor shaft seems to spin inside the helical drive gear (no bueno). I’m continuing to troubleshoot with them - impressed with their tenacity! Still no new servos received - maybe next week…
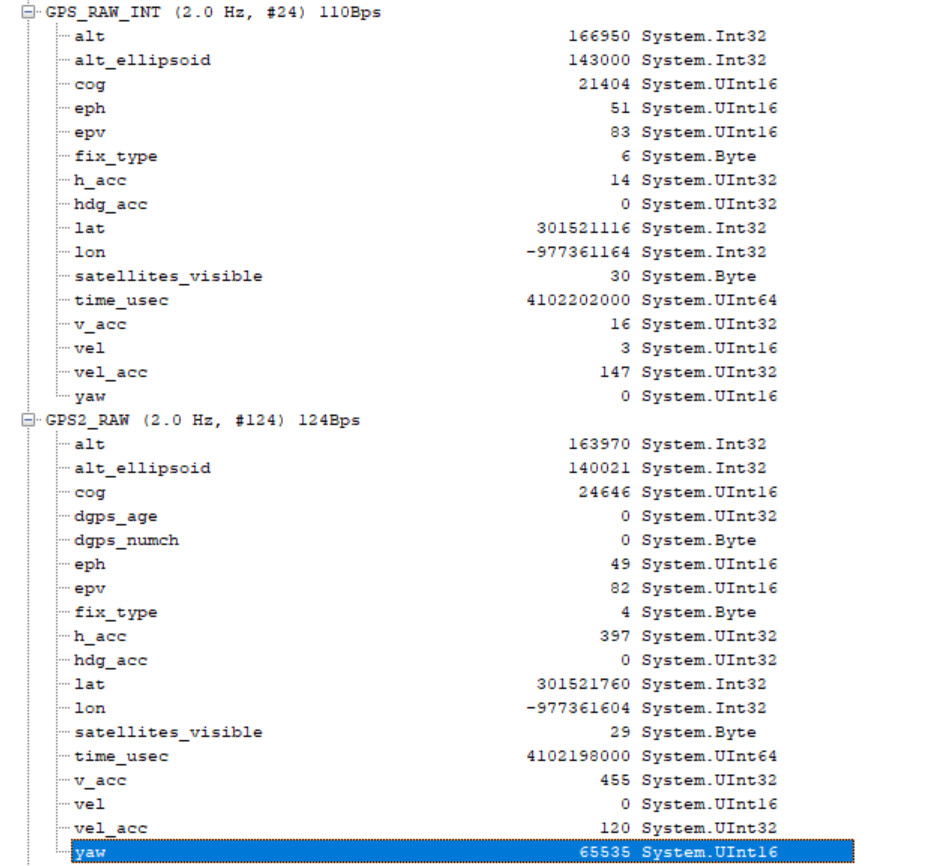
Working my GPS yaw and have a question - the documentation says measure from the center of the rover to the offset location. Seems to me we got mine working at Mowstock and just measured between the 2 antennas. My heading is a little off, and I’m getting the 65000 error in the Mavlink GPS2 yaw counter. What did we do to resolve that?
Thanks all - hoping to mow shortly after that servo shows up!
Latest param file
26APR24.param (16.0 KB)
And, my battery monitor started working…?
![]()
Well, it looks like you have several things going on and you are getting into an area where everything has to work and every detail matters. I would be expecting GPS1 to be showing RTK Fixed and GPS2 to at least be showing RTK, since it gets a correction straight away from GPS1. I would check out that GPS antenna wire we were having trouble with when I was there. Until you can get RTK Fixed on both units, noting else is going to work. Make sure they have a good view of the sky (clouds can cause problems at times also). Check to make sure the GPS units or the wiring is not mixed up. If GPS1 still shows RTK with no base station input, something is mixed up. I am not an expert on GPS systems and I was one of @Yuri_Rage’s worst students, but in all the struggling, I have always been able to get them working.
One thing that complicates the setup on your mower is the fact that your GPS antennas are not mounted in a simple symmetrical geometry with respect to the IMU (flight controller). One is more forward of the IMU and the other one is a different distance behind the IMU. Left and right their distances to the IMU are also different. Then there is the height up and down (if they are level with each other it is easier). In your case you will have a different elevation for each one.
Use the WIKI information on getting the spacings correct.
https://ardupilot.org/rover/docs/common-sensor-offset-compensation.html#common-sensor-offset-compensation
Being close doesn’t count, if that final antenna spacing is off more than fractions of a centimeter (in 3 dimensional space), it is not going to work. When we tested the GPS systems at MowStock the antennas where level on the ground and placed at the correct spacing. We had RTK Fixed on both.
I would make two assumptions (which might be controversial, but it is the way several of us have set these mowers up).
- Assume the center of gravity (for a mower) and center of rotation are the same and is located (left and right (Y axis) and front to back (X axis)) at the center between the rear tires on a Zero-Turn mower.
- Assume that the IMU (located in the flight controller) defines the elevation (up and down (Z axis) of the center of rotation.
Hope this helps, but it does take some time to check and double check every detail.
Will do Steve - thanks as always…
And, my battery monitor started working…?
![]()
Well, I have installed and tested the back-up remote control kill switch I mentioned before. My RC transmitter and receiver are my first line of defense, but I wanted a second layer of safety. below is the unit I am going with for now. It is a 433 MHz gate opener type transmitter/receiver designed for a working maximum working range of 300 meters. I tested my unit installed on the mower at 120 meters (a typical viewing distance I operate from), with the mower operating cutting grass and the shutdown switch worked perfectly every time I actuated it. It was a clear line of sight and I used an external gate opener antenna on the receiver that let me move the antenna away from the actual receiver. I mounted the receiver in one of my enclosures (because it is not water tight), unscrewed the small dipole antenna on it and installed an external antenna connected with a short piece of cable using the SMA connector.
There are 2 of these units out there which look very similar. One is rated for 300 meters and the other one is rated for 1500 meters. The longer range one had a bigger transmitter that would not be as convenient to fit in a shirt pocket. I actually bought both units and have experimented with both a bit and the transmitters are interchangeable if paired up to which ever receiver I was using. There is a pairing process and privacy codes involved to keep each 433 MHz radio from triggering the switch. I think the main difference between the 2 models is a bigger transmitter (more milliwatts of power transmitted) in a bigger case with a bigger battery. Since the smaller unit worked fine for my application, I just stuck to the pocket size transmitter. I wired my receiver directly to my mower’s battery (through it’s own dedicated fuse) and it stays connected 24/7. This way I don’t forget to turn it on. I measured the current drain of the receiver at 30 milliamps. I will likely end up putting a battery disconnect switch on the battery later on for periods when I am not using the mower. It should be noted that the receiver does not provide an open and closed contact. It provides switched 12V power to control an external relay.
I would expect that every installation will be a little different due to different RF noise environments and equipment configurations. Like @Yuri_Rage said these are cheap products and caution is advised. In my case a plan to actuate the switch each time prior to starting the mower to make sure it is still operational.


300 meter range
https://www.amazon.com/dp/B09B6MRMNL?ref=ppx_yo2ov_dt_b_product_details&th=1
2 Likes
Good luck getting the advertised range outta those guys. And technically 433MHz requires an amateur license in the US.
Great idea overall - I just hope it doesn’t let you down at a critical moment.
2 Likes
Unlicensed use of 433 MHz gate openers is authorized by the FCC under Part 15 These devices have to be approved by the FCC prior to sale. The transmitters use very little power, and they are only broadcasting power for the brief second you depress the button to actuate the switch.
All that being said, these products are being made in China and probably not FCC approved, and who knows how much power they are broadcasting. That is part of the reason I went with the smaller pocket sized transmitter.
3 Likes
Belt AND suspenders! Nice to hear it’s working Steve! My relay bank showed up today!
2 Likes
Servos arrived today!
After you prove out that gate remote a bit more, i may get one. I’m not very impressed with the remote controlled relay board I have. It is not reliable.
Long range isn’t all that important to me. I just want to be able to kill the mower without having to get super close.
2 Likes
how about radio failsafes - if RC not connected - then stop etc
I power our mower up first - and confirm the beeps when the radio is turned on.
Also - mower stops when RTK Fixed is lost etc.
Was thinking of scripting xtrack error > 2m but that doesnt cover the wrong plan being sent…
1 Like
Crazy day - got my new servo installed, and buttoned up the wiring harness. Still need to fabricate a mount for my 5gal fuel tank, but have an idea. These fuel tanks come with giant (5/8") fittings and my fuel line is 1/4" (vent is 3/16").
Spent at least 2 hours trying to get my firmware updated and (solved) found that my computer/Pixhawk don’t play nicely with the USB-C port on my computer - when I put an USB-A to USB-C, all was well and good. Firmware uploaded to the latest Beta (why not), and I’m going through the setup again after @SJohnson clued me into his detailed process. Hoping to reduce the missteps I made prior to Mowstock and him showing up here in Aus.
I still need to paint the push-rods (low carbon steel), or, (someday) replace with stainless like everything else - just want to get this mower to work - grass keeps growing.
All is close and hoping for a non-rc, autonomous run soon. Pics tomorrow.
cd…
1 Like
Keep us posted! Good luck!
Everything is back together (electronics box, servo, wiring, and, ARM from RC working!
Still have issues with GPS I think - likely something around GPS YAW. Will work on the fuel tank this week, and come back to software. Current param file:
5MAY24.param (16.0 KB)
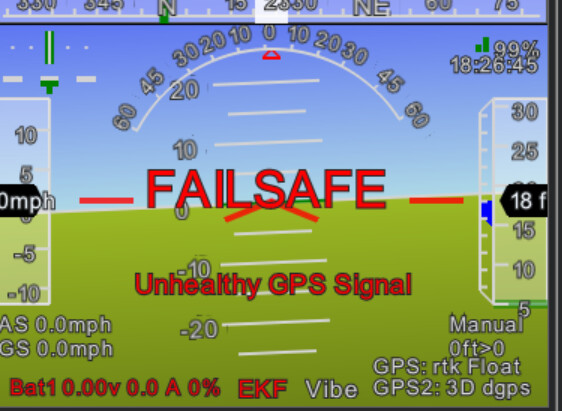
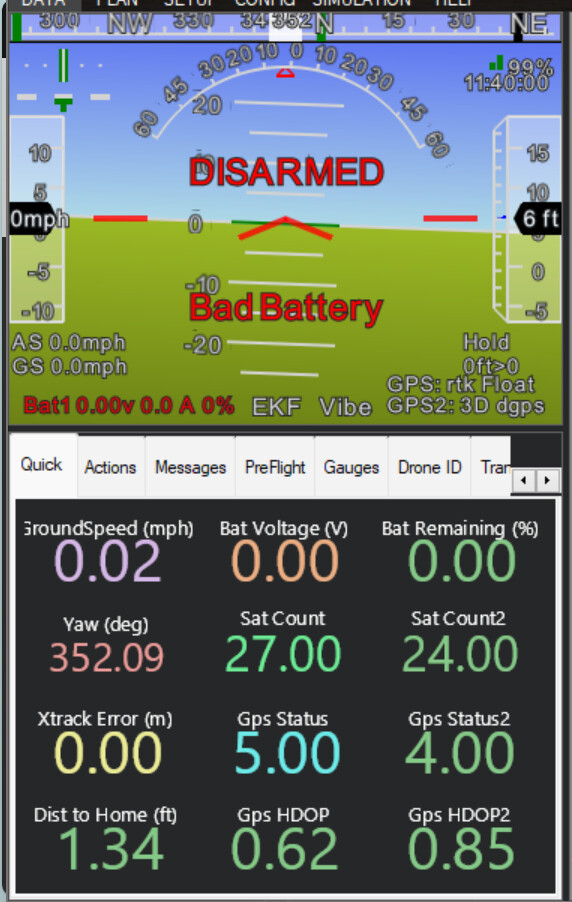
Problem set to work:
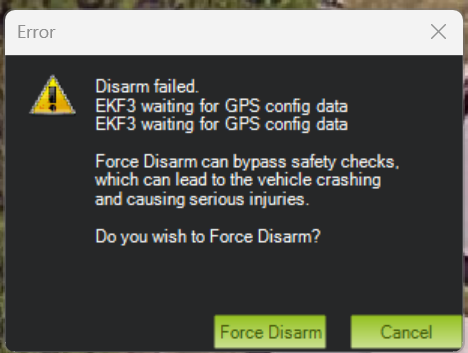
EKF waiting on GPS config
I would have thought I would start up in a DISARMed state, but am always armed - hmmm. Then, can’t DISARM - Force disarm yields a MAV error

GPS yaw - was working, now is not, ok, now it is - need to get fuel sorted so I can get out in full sky…
Fuel tank mount/fabrication
cd…
If you’re under cover, GPS will be problematic. Stop worrying about that.
1 Like
Gotta get that fuel system done so I can wander…thx. Figured out the arming - ARMING_REQUIRE was 0, set to 1
I’m a fan of the radio failsafe idea.
On my previous mower, I had an RC receiver that would output SBus and individual PWM channels simultaneously. So, I had SBus going to the flight controller. I had 2 PWM channels connected to an Arduino Nano: (1) an unused PWM channel that I used as a kill channel and (2) the throttle channel (channel 3 I think). The Arduino would kill the engine if either the kill channel went active from the RC transmitter or if it detected the throttle channel going below the normal PWM range for a few seconds. The receiver had a feature that it would drop the throttle output below the normal minimum if it lost the transmitter signal (a common feature, I think).
I liked this safety feature being external to the flight controller.
On my new mower, I’m using a receiver that doesn’t have the separate PWM outputs so I can’t use the same scheme.
1 Like
Hey @ktrussell , I’m just happy @SJohnson came by and helped me sort my RC xmitter. Getting the flow now and will implement the radio kill after I can actually mow something.
2 Likes