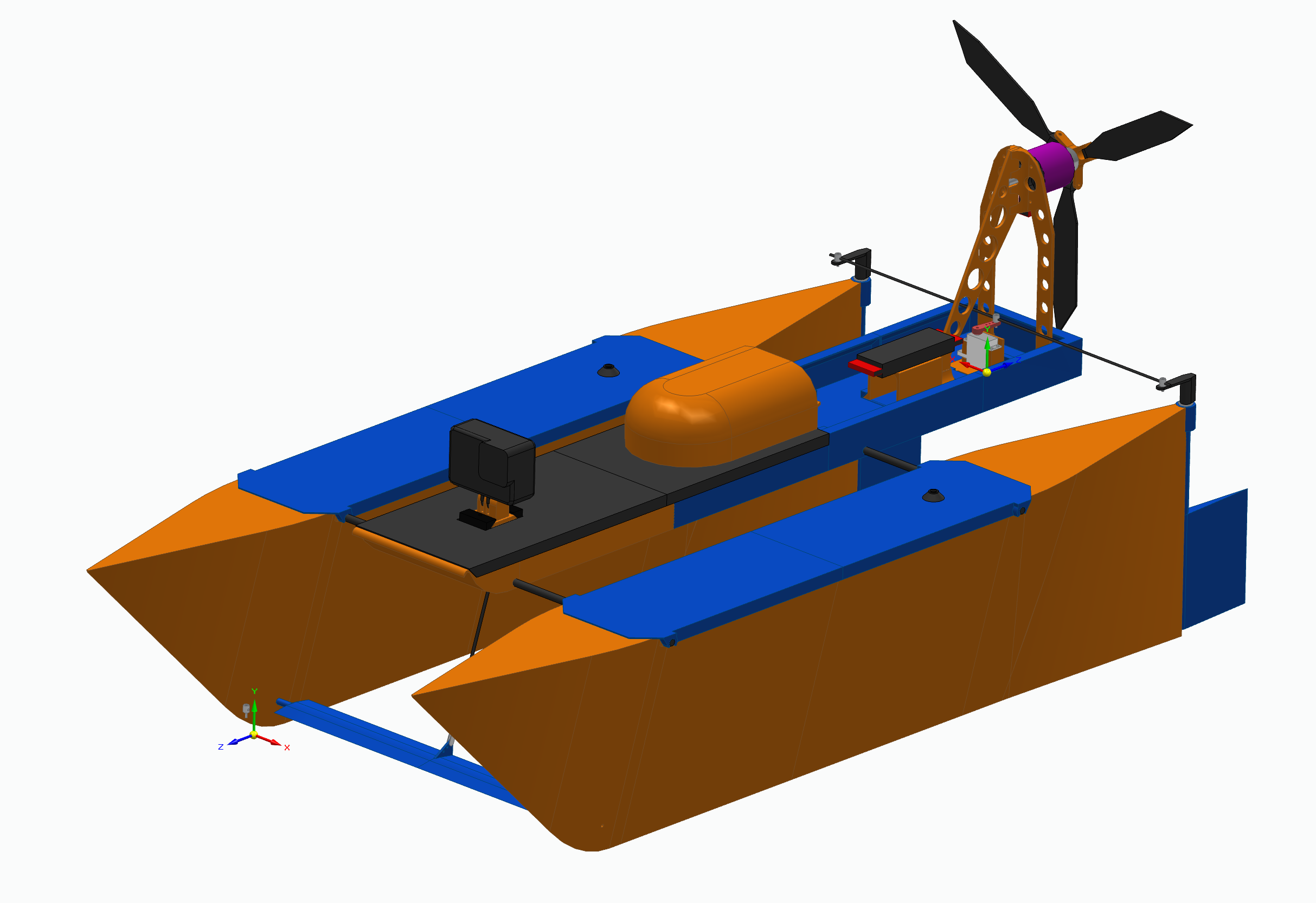
So far I only have experience with Arduplane in connection with a handful of fixed-wing models. Now I have dared to try my hand at a boat that I designed and built myself. I decided on a catamaran design with a propeller. The whole thing is controlled with a Matek H743-Wlite + GPS.
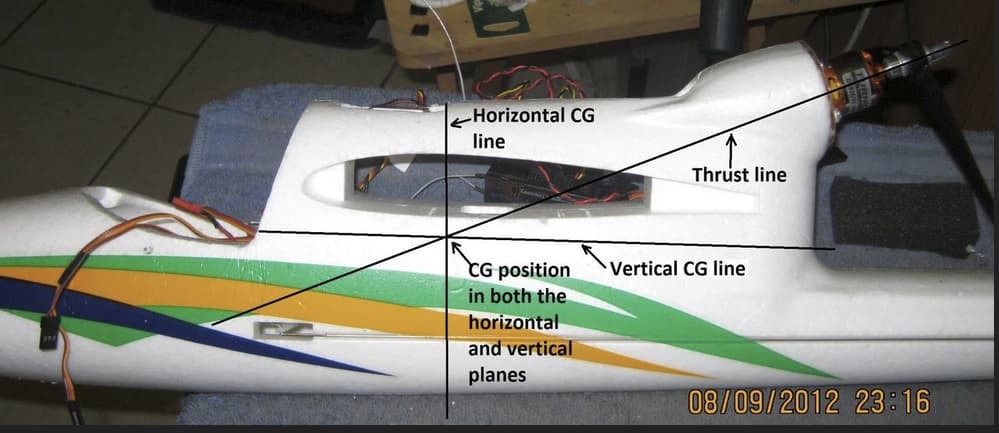
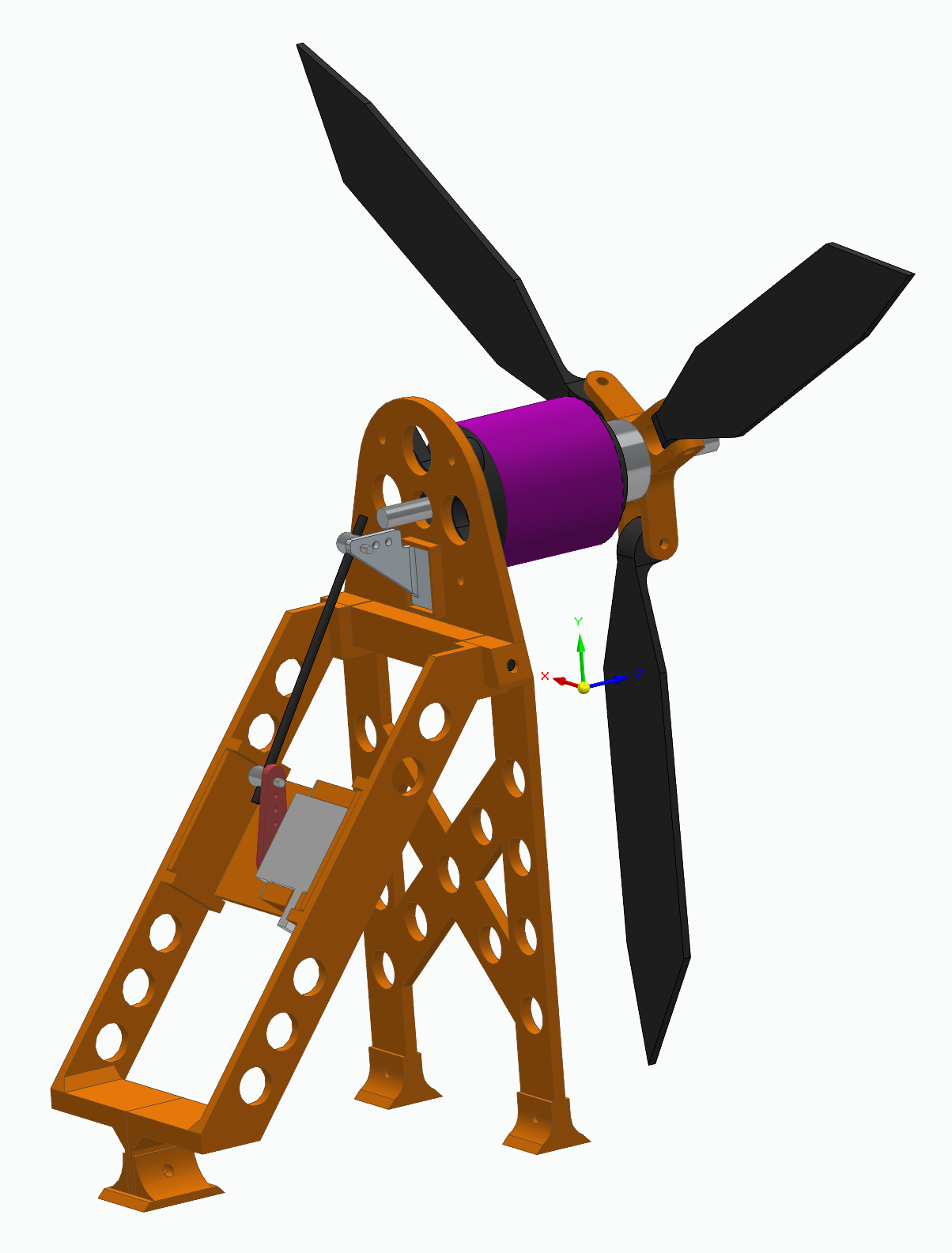
I decided to use a relatively powerful (500W) aircraft engine from Hacker, which I still had on hand. I decided on a 3-blade design so as not to make the propellers too big. This allowed me to keep the height of the motor mount as low as possible so as not to move the motor any further away from the longitudinal axis of the boat and also to prevent the propeller blades from hitting the water in waves. I already thought that the engine position was not ideal and that the lever would probably push the boat slightly forward into the water. During the first test drive, however, I realized that the problem was much bigger than expected. Any throttle setting above 10% resulted in the bow tips sinking so deeply into the water that even a small swell caused too much water to come onto the upper deck. It was out of the question to drive the boat under full load, then it would have immediately become a submarine ^^.
Of course, I could solve the problem as far as possible with a different / wider hull design, but I had chosen the slim catamaran hull specifically for crosswind stability on autonomous missions and didn’t want to throw all the work down the drain.
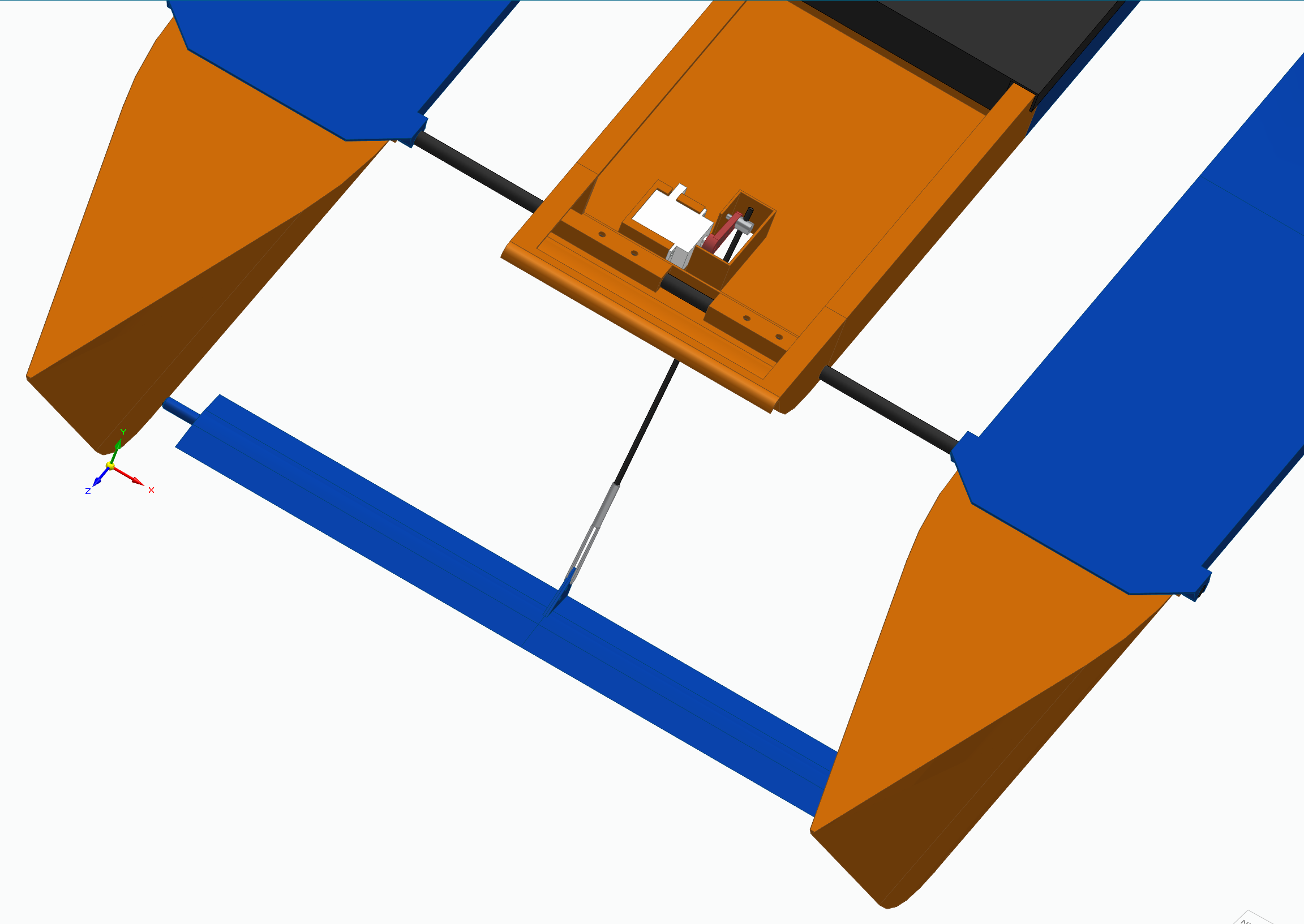
I therefore opted for an alternative. For airplanes it would be called a canard, but I don’t know what it’s called for boats. So, the canard elevator is already desgined and installed and connected to a powerful servo. Of course, I could use the remote control to change the angle of attack while driving so that the bow remains safely above the water. I just thought it would be much more elegant to leave the control of the canard elevator to the flight controller, which is much better at keeping the boat level than I am, basically like the elevator on an airplane. And now I finally come to my question :): How do I implement this with Ardupilot. Which firmware should I use? So far I have already had problems with the implementation without Canard with Ardurover/boat because I use an air propeller (but control is via rudder) or should I better use Arduplane because there is a elevator control or even ArduSub which I haven’t looked at yet?
I would be very happy if you could give me a few useful tips to get me on the right track.
If you’re up for Lua script development then that’s probably the way to go. Perhaps just a direct output from the vehicle’s pitch to a servo output connected to the canard.
I’m not a frame designer but I think the downside of the canard is that it’s going to collect leaves, plastic bags and whatever else is floating near the surface of the water. I know you’re not keen on modifying the design but I’d recommend moving the propeller to be above the center of the vehicle instead of near the back. Or two motors, one on each hull but again near the center.
From what I can see the problem is that the hulls are too short so it doesn’t have a lot of pitch stability combined with the thin narrow hulls not giving much displacement so small disturbances will cause it to bob up and down. Combining those factors will result in the behaviour you are seeing. ideally it needs to be longer, it will give you more buoyancy and pitch stability stopping it from trying to submarine. or you need to make the hulls wider to give it more stability. Making it longer shouldn’t effect its efficiency.
if you want to continue with the canard idea then you could probably use the pitch gimbal output to try and keep the boat level without using lua.
Thanks for the answer!
I took a quick look at the Lua scripting and it doesn’t look too complicated. I’ve written a few Lua scripts a couple years ago, so it looks doable for me. Thanks for the suggestion!
Regarding the motor position, I’m not sure if moving the motor to the center would help. I’m probably missing something… I think it would help to change the motortype and use a large impeller to get it close to the longitudinal axis, but the downside would be even lower energy efficiency.
You’re absolutely right about the canard catching trash or aquatic plants, that’s what I was thinking too. With the previous design with a propeller, this was not a problem at all. There’s a saying in Germany: I have to die some kind of death…
Of course I will report here when I have something halfway functional and I have already learned a lot incase I will do a completely new design later.
From your point of view, is there anything against using arduplane instead of arduboat for my special boat combination with canard? Does this open up new problems you can think of?
Thanks for your reply geofrancis!
You are absolutely right that the horizontal stability is not good due to the narrow hulls. However, the boat is just under 1 meter long and I didn’t think it would be such a big problem. Unfortunately I have absolutely no experience in boat building but I am learning a lot :). I’ll make a mental note to make the hulls longer next time. Unfortunately, a few hours of work and a lot of filament have already gone into the existing hulls, so I don’t want to dispose of the hull straight away. Just sanding the PLA smooth and waterproofing it with epoxy was a lot of work. I’ll upload an original picture tomorrow.
So I would just want to continue with the canard approach, with all its disadvantages, simply because I would find it sexy if I could control the canards fully automatically with ardupilot :).
I can roughly imagine how your suggestion works and thanks to rmackay9’s link I will also pursue this approach, probably before I reinvent the wheel with Lua Many thanks to you for this as well. I’ll let you know when I’ve made progress!
I wish you all a Merry Christmas!
This may allow you to take out that elevator, which as Randy says will probably collect rubbish. Hey- Stick it behind the motor, servo controlled tilt of the motor - dynamic pitch control but without the garbage collection
Moving the pivot so it’s inline with the centre of the motor will greatly reduce the amount of force on the servo. With the current design, all the motor’s thrust is going into the servo and linkage.
Dear Hans, I agree with you that a hydrofoil, especially in combination with a sensible angle of attack, would raise the bow depending on the speed. However, since there is a suggestion to mount the engine flexibly, I would like to follow this suggestion for the time being, as the boat cannot pick up any garbage in the water like it can with a canard. Nevertheless, I will come back to your suggestion if necessary. Thank you for that!
geofrancis this is an obvious but never the less great idea which I completly missed it Sorry I am not a mechanic or engineer and sometimes this is obvious
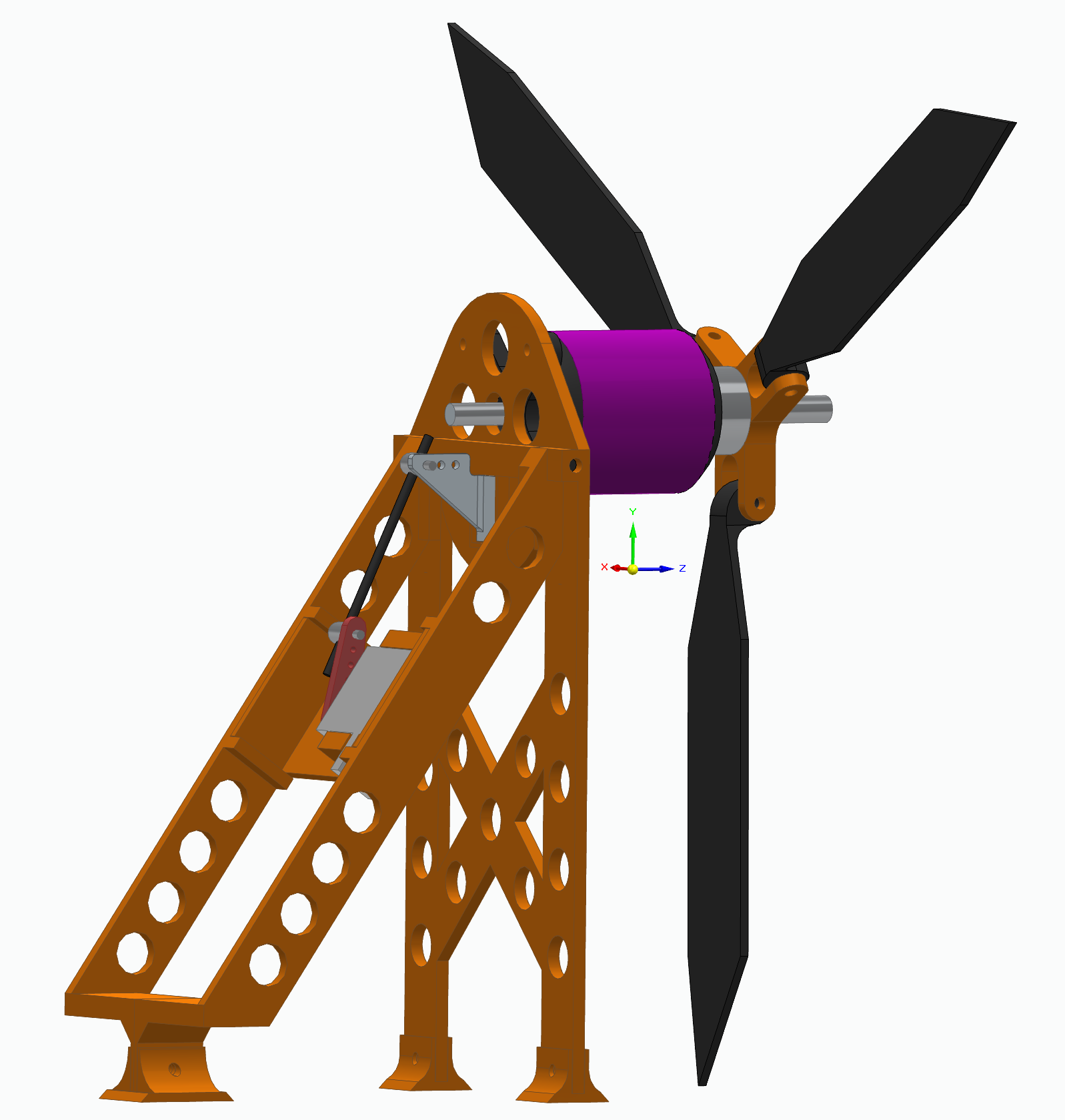
Because of the protruding motor shaft, I can’t design the axis of rotation in the middle of the motor and the ventilation of the motor should still be possible, but I was still able to raise the tilting axis significantly and thus relieve the servo. thanks again for the tip!
Hi Dave and Randy, can you explain in more detail how you think I should move the motor?
I realize that the engine so high up above the hull has an unfavorable angle or creates leverage but unless I want to completely change the drive system I don’t see any other option. Or do you think I should move the engine more towards the center of the boat, i.e. in the middle of the longitudinal axis? I wouldn’t understand that because the narrow hulls don’t generate much lift anyway and if I move the engine forward even less lift could act against the engine. Please give me a more detailed explanation.
I think your canard idea will definitely work. However, I believe, like others, that it will give you fits by fowling with trash, plants, etc. It’s also not the most hydrodynamic efficient choice.
Angling the motor thrust line upward will certainly help but at the expense of submerging the sterns a bit (more drag) and placing the prop closer to the water. Not ideal but might work.
Making the hulls longer and slightly fuller forward is your best bet but I understand well the extra effort involved. Also you will have a balance to achieve between hull length and turning abilities.
Might also consider just living with a smaller motor with less thrust. But that’s less fun…
Bottom line: Try the other options and see how they work! Good luck!