If you already printed the motor tilt mount you may try using a turnbuckle instead of a servo. It may not need active adjustment once set.
Hi Dave,
a fixed angle setting would indeed help as soon as you have figured it out, but then it would not be speed-dependent or thrust-dependent and would also work when driving slowly and would therefore be less effective than a speed-dependent solution. Besides, such a solution is not that cool :D. In the meantime, I have improved the motor suspension again and successfully passed the first function test. Tomorrow I’ll do the test under load and full load. Let’s see if the whole thing holds. I’ll keep you up to date… Thanks anyway Dave for the suggestion!

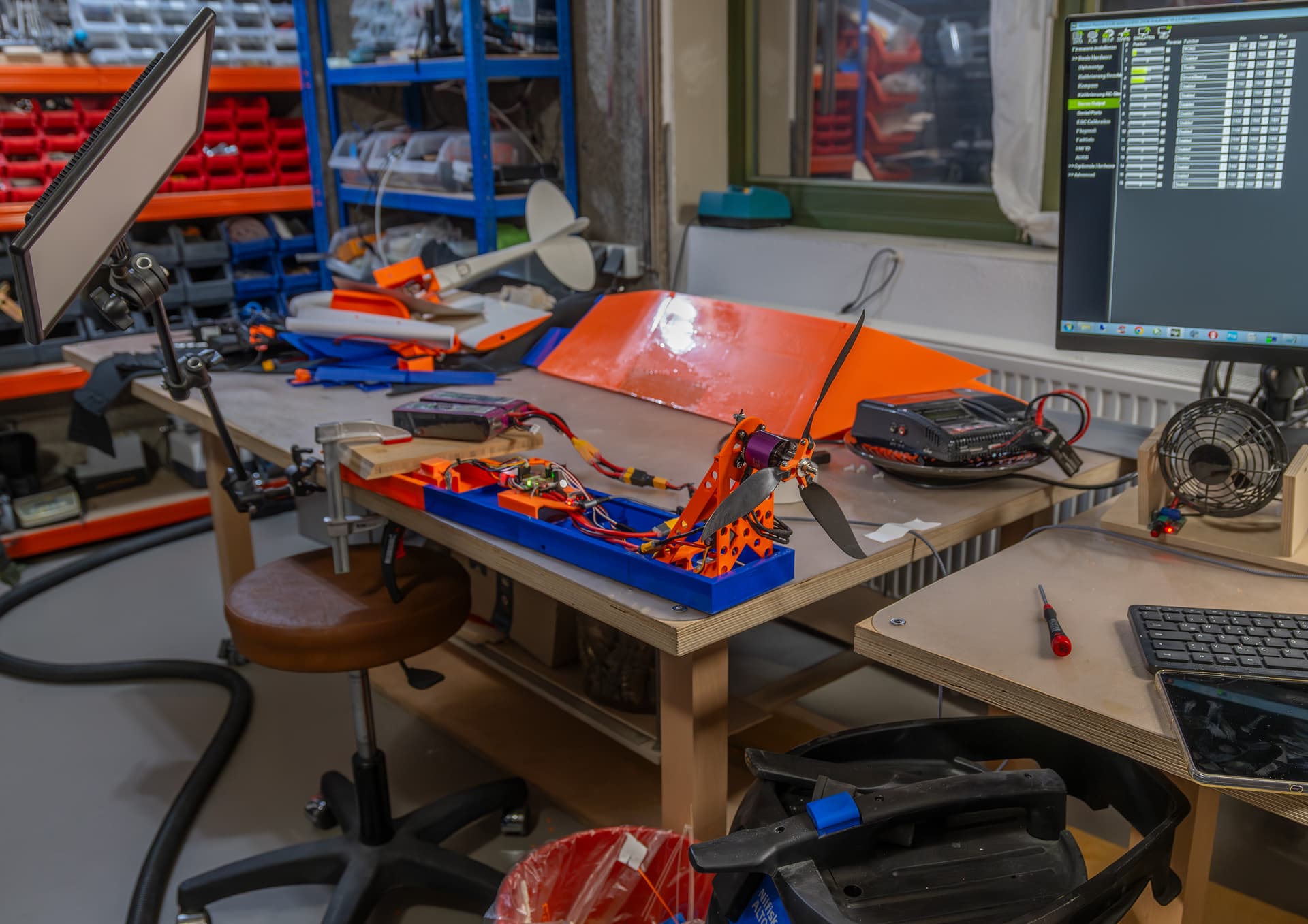
This was the test setup and the test was successful!
Max load was 55 amps x 14.8v (4s) = aprox. 814 W and nothing broke, not even the self printed 3-blade middle peace. The servo withstands the pressure too and can move the motor reliably.
I´ll try to upload a video tomorrow and post a link here for those who are interested.
Thx to all who helped me.
Next step will be to link the servo with the pitch gimbal output mentioned by geofrancis earlier here. So far so good… have a nice new year everybody ![]()
1 Like
Sorry that the image quality is not the best. I thought it is a good idea to setup my gopro to 2.7K 240 fps and shortest shutterspeed possible to have a good slow motion in case something breaks but fortunately this didn´t happen.
1 Like
According to Randy and Geofrancis I used the Servo gimbal to compensate the up and especially the down of the boatbug during higher thrust.
I used “RC-Targeting” to manually controll the pitch offset to finde the startingpoint. Now the pitch of the motor is leveling nicley while the boatbug is going up and down. You can see it a bit in a video which I uploaded to youtube here: Arduboat automatic leveling
The only concern I have is that this method just compensates the amount of degrees the boatbug dives down from horizonal line, what is if the motor needs more degrees to keep it level? I can not find a kind of multiplier in the settings of the gimbal in ardupilot, in otherwords a way to “overcorrect” the movement. Any ideas here ? (I know I still have the lua scripting in backhand)
After reaching this intermediate goal, a first test in the water will follow as soon as possible and I will then report back.
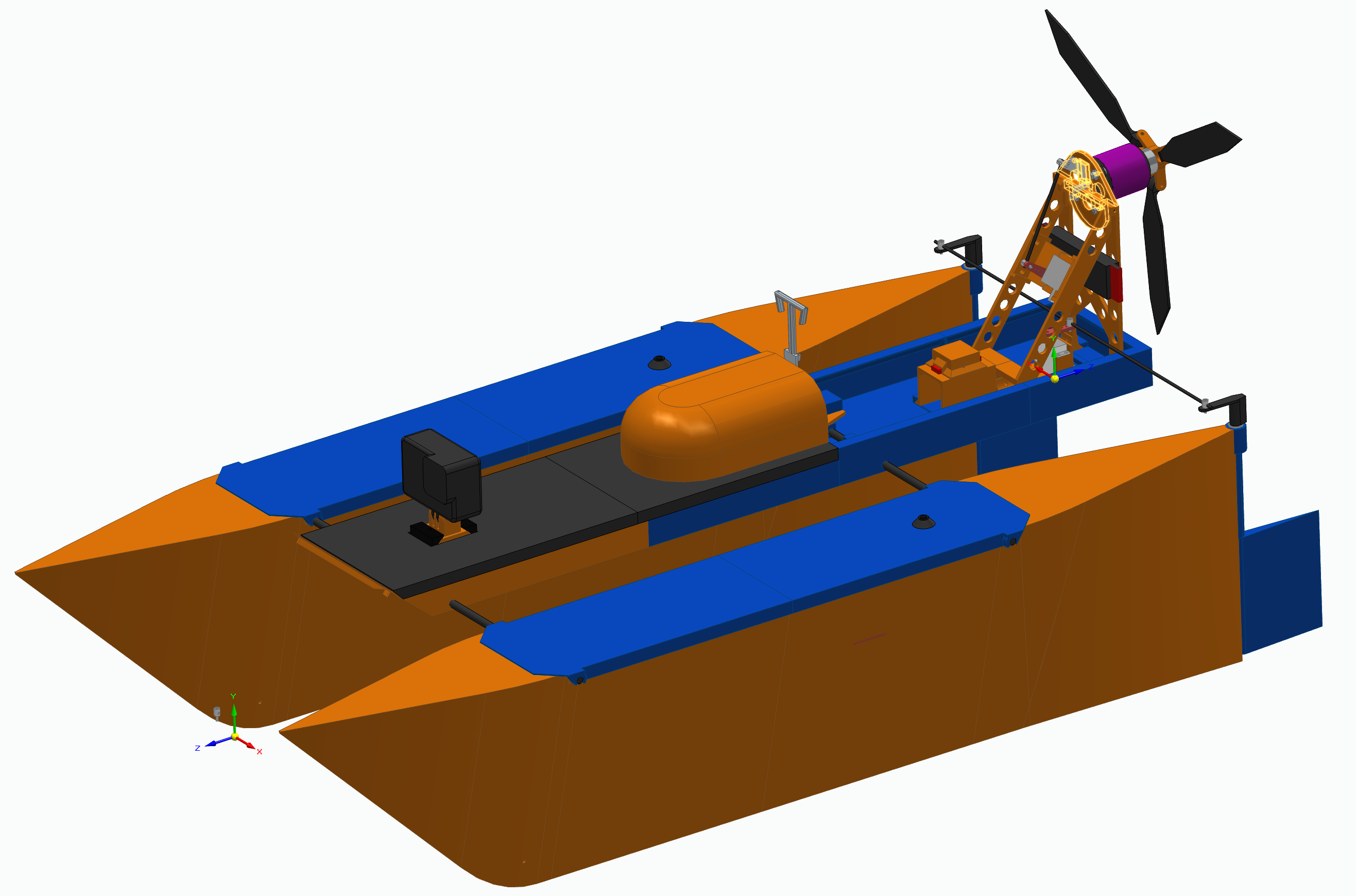
Here is a virtual and a real picture of the current status.

2 Likes
One option is to mix a little throttle into the pitch so it adds some pitch when you give it throttle.
You could also make the gimbal overcorrect by telling it that its moving over a smaller range than it actually is.set its range as something like ±5 degrees so should give full deflection at 5 degrees
1 Like
Ah geofrancis, great ideas thanks alot!! I guess I will try it first not overcorrected but I will change in case it does not work to my satisfaction. Keep you updated!