Hello, everyone! I’m currently having a lot of trouble trying to set up the Ardupilot and run Autotune in my Elevon project. I’ve already tried almost everything I could find in the documentation and on this forum. That’s my 6th crash, and I cannot figure out how to fix it.
The plane weighs about 600g and is made of foam and wood. It’s quite aggressive, not the easiest plane to fly, and I usually need 90-100% throttle during cruise (I understand it’s not the ideal scenario, but it’s a restriction for this project).
Only time that I could turn on autotune without losing it straight ahead, but it was pitching all up or all down.
My PID values remain default; I’ve only completed the initial calibration of the compass, leveling, and acceleration, making minor adjustments thereafter, such as servo and throttle trim.
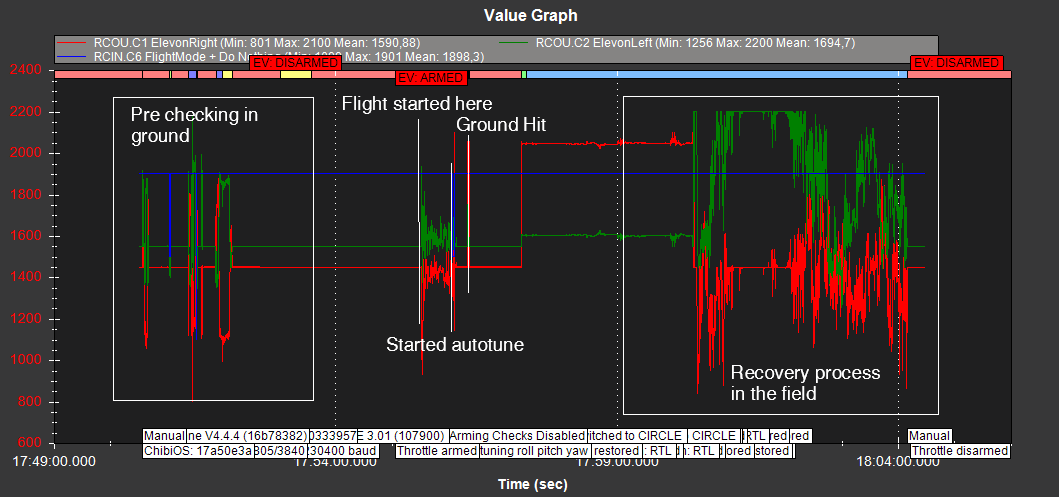
The following logs are referenced from the flight marked as ‘3’.
Theory 1: the plane is out of C of G and it stalled. In manual mode there is a lot of elevator input in one direction (I think nose up) needed fly the plane. Suggesting the plane is out of trim or out of C of G. When the plane went to autotune it was flying slower than in manual and I think it stalled. And as you pointed out, having to run at max throttle all the time is not a good sign.
The log file you posted was actually a .log file not .bin, so the intervals on things like the servos is pretty slow. Either way, I don’t see oscillations or movements of the servos to suggest a commanded problem. Looks mechanical/aerodynamic.
Theory 2: I wonder is if the FBWA control check was done properly? Obviously since it flew in manual mode that RC inputs are correct, but when in FBWA mode do the controls make the proper corrections? Elevon Planes — Plane documentation
Theory 2 is unlikely because we did a pre-flight control check, which included testing in FBWA mode and adjusting servo trims.
I’ll double-check the CG again, but I’m almost certain it’s correct. However, after building six different planes, you never know.
I have some doubts about certain tips provided in the autotune guide. It suggests that the AUTOTUNE_LEVEL should be 8 for light foam planes. However, it also emphasizes the need for an experienced pilot. I’m uncertain whether to stick with the default setting or make adjustments. Same for parameters mentioned in the Tuning light, agile aircraft
I’m also thinking about changing the TECS parameters. Do you think keeping the default values will work fine, or should I tweak them (before tunning) for better accuracy?
*Fixed file (I think it’s the same sampling rate as before)