Am using copter with fmuv3 radiolink autopilot, mn5008 400kv t-motors , firmware version is 4.4.4. I have planed waypoint 5km range model successfully reached 5km while returning to home due to radiofailsafe it will trigger RTL almost near 3k distance from home model got crashed. I need to find the what is the reason exactly. with this discussion. i have attached crashed flight log LINK also kindly anyone find the issue and give me the solution.
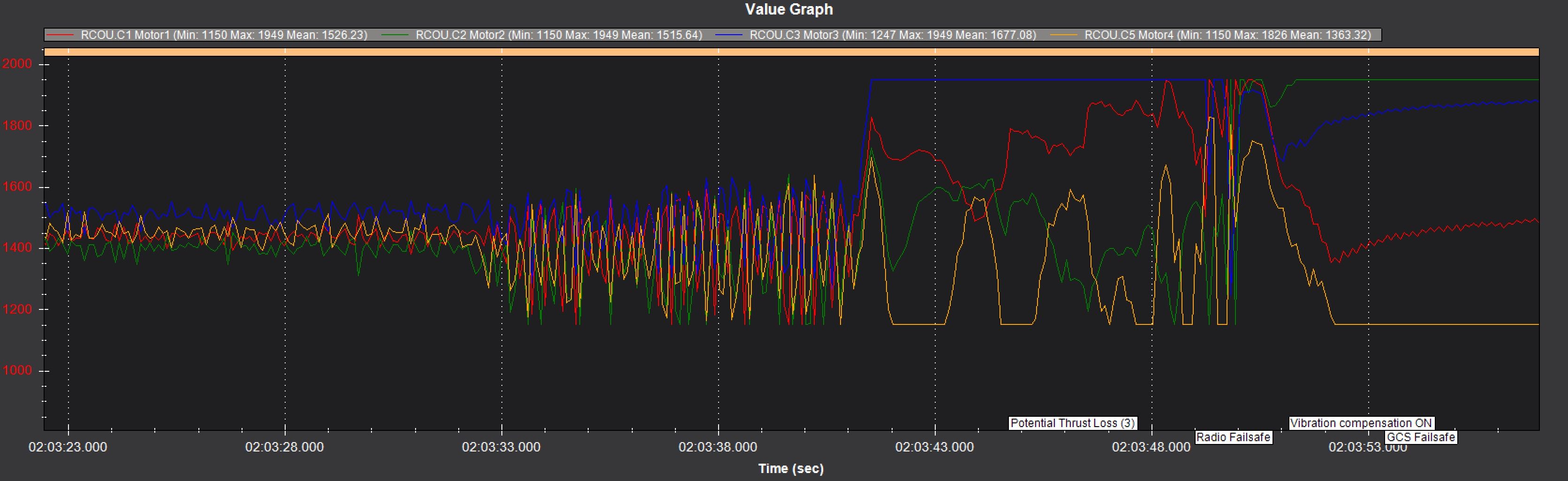
Thrust loss on Motor 3, Motor 4 dropped to compensate and now it’s in Rapid Return To Earth Mode. ESC, motor or prop failure are some possible causes.
I would say update to latest Stable version of firmware but a better plan would be to replace that POS Radiolink Flight Controller with one that has proper support from Ardupilot.
BTW-I see you have configured for Dshot but the outputs are configured for PWM so you have PWM. Dshot doesn’t work on the Main Outputs anyway with the version of firmware you are using.
2 Likes
thank you very much dave. even i used 4 in 1 66amp t motor esc blheli 32. which they are using fpv motors
Check all the solder joints / pins that connect your ESC with FC and motors. Then throw out the FC. Pixhawk 2.4.8 is bad, and Radiolink is evil. ![]()
2 Likes
thanks for your reply oli. sure i will follow that.