I recently encountered a crash with my 12S setup equipped with a 30-inch propulsion system and 100KV motors. The All-Up Weight (AUW) is approximately 18kg. The ESCs use Oneshot125 PWM, which is set in the Cube Orange Plus, using the AUX pins CH9-12 as Motor Outputs.
After completing the initial parameter setup through the Mission Planner, I performed several successful flights, after which conducted an autotune. Although the initial flights had little to no oscillations, the vibrations were relatively high, occasionally reaching the first red line (30m/s/s) on the Z axis in the Vibe window. The X and Y axes had lower vibrations, ranging between 10-20m/s/s. Despite the high vibrations, I proceeded with further flights in Loiter mode since all clippings were zero.
On a windier day, I flew an entire set of batteries successfully, even though the vibrations were higher this time, and the Y axis touched the red line occasionally.
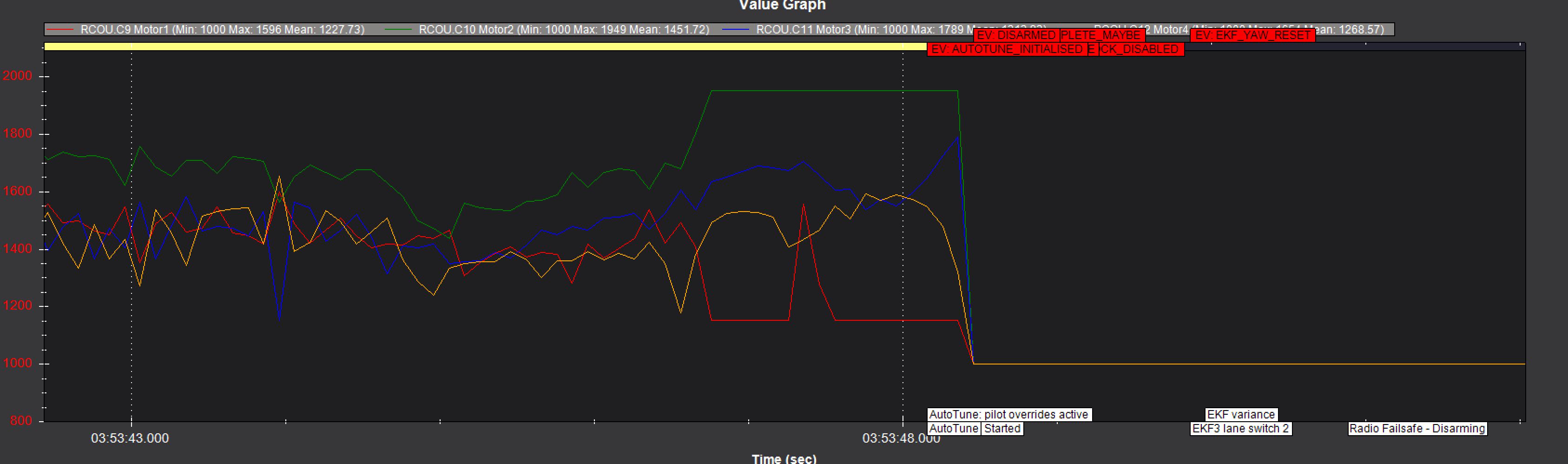
However, during a manual flight in Loiter mode, while performing a pitch back maneuver, the copter lost yaw and started rotating until it hit the ground. It did not flip over. Unfortunately, I was unable to identify the exact cause of the crash. Here are some of my speculations:
- The high vibrations could have been a contributing factor. The board is mounted at the CG directly, using the foam pads provided with the Pixhawk.
- I disabled the internal compass since it was enclosed entirely. Instead, I used the compass in the GPS, which is a Here2.
I have attached the log file to this post for reference: Log file Drive Link
It would be of great help if someone could offer some insights into the possible causes of the crash.
P.S: The mode change to autotune in the end was when I accidentally hit the switch for it along with the disarm switch when it was already about to hit the ground. You can see how it lost yaw and started losing altitude, which was when I hit the disarm switch.