I am building a quadplane for an engineering senior design project. We had a break from class recently and threw together a prototype that we could learn some things from.
It is a modified SkySurfer trainer plane. We put aluminum spars through the wings to support the aluminum channels used to hold the quad motors.


Current specs:
Pixhawk Cube Black
2-4s 30A Simonk escs
4S 4500mAH LiPo
2212-920kv quad motors
14" carbon fiber propellers
7.66 in prop pitch (measured, so probably not super accurate)
Push motor that comes with the plane originally (we’ll have to change this eventually, but for now we’re just trying to get the quadplane to hover)
Weight without battery: 1700g
Center of gravity slightly forward from the middle of the wing (battery being strapped on top for now)
This version of the plane could not get off the ground at all. We reduced the battery to a 4S 1500mAH and we could get it off the ground, but it couldn’t go any higher than ~1ft and it was uncontrollable (yaw issues, drifting one way or another). The control issues are almost certainly due to a misalignment of the quad motors, so we’ll have to do some adjustments to fix that. But first we need to make sure it can even get off the ground.
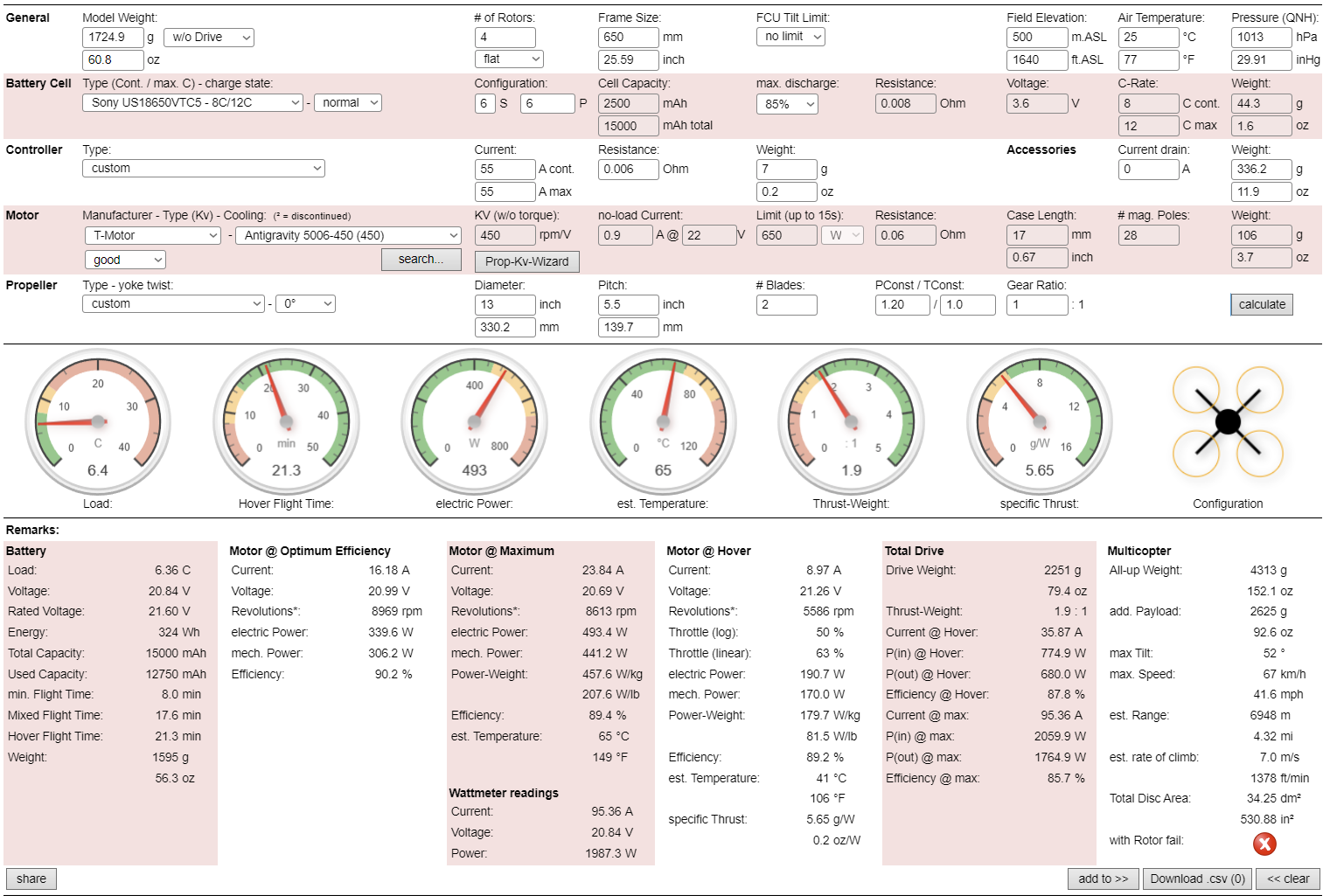
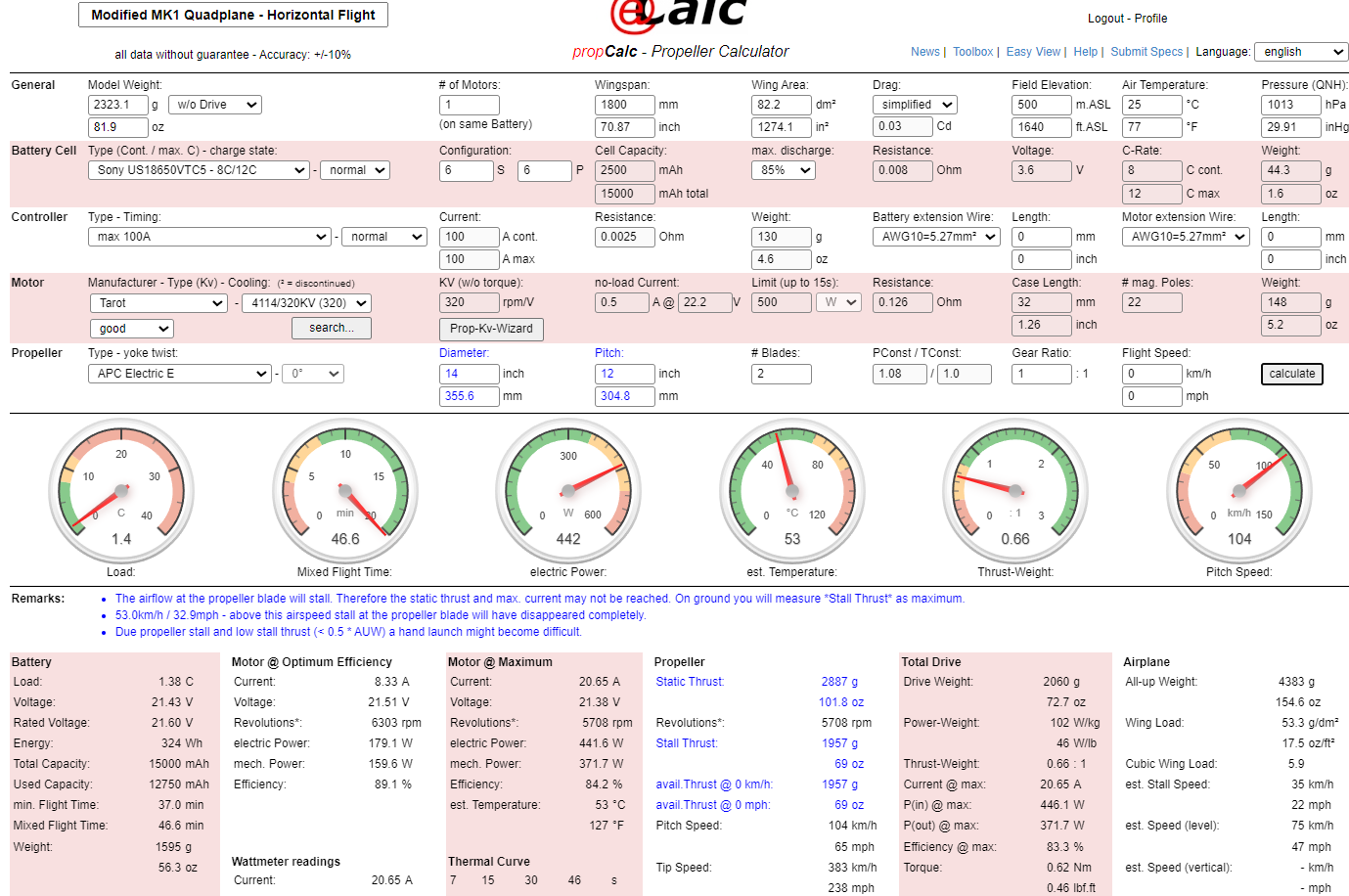
My first thought is that we need higher power, lower kv motors. 920 is too high for a 14" prop. At my school we have an extra set of 4 Tarot 4114-11 320kv motors, so I’m thinking we can use those.
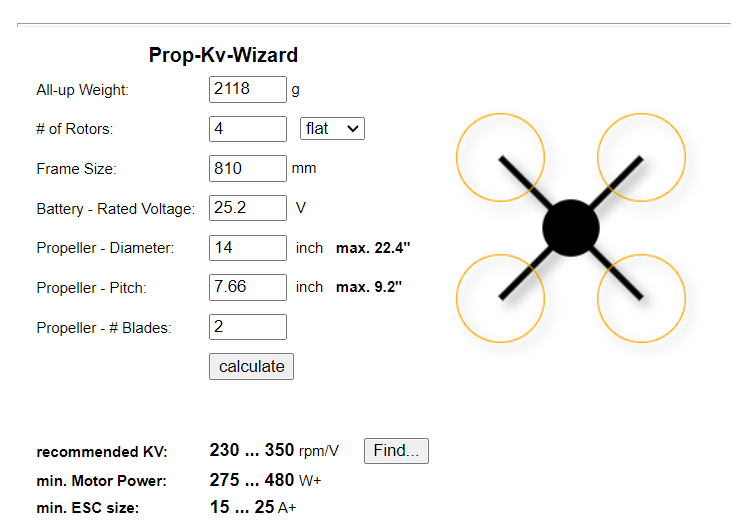
I used the ecalc prop kv wizard to find a configuration that would result in a recommended kv around 320. I determined that we would have to increase our battery voltage to 6S to get the recommend kv down to our desired 320. Sticking with 4S would result in a higher kv.
Is that a good course of action for getting the quadplane off the ground? Or is there something else we’re doing wrong?
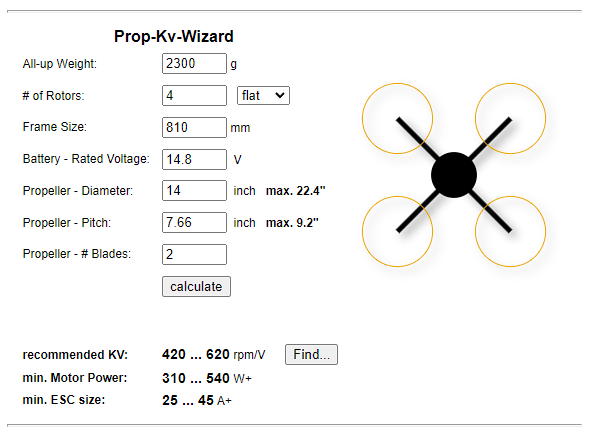
In this thread, I found someone who claims to have a working quadplane with the specs listed in the picture:

His quadplane is a similar weight, has a similar battery, has higher kv motors, and has smaller props. Yet his flies and ours doesn’t. That makes me think we’re missing something here.
Here are some log files from our first few unsuccessful hover attempts:
2023-10-28 10-26-26.bin - Google Drive, https://drive.google.com/file/d/1oJv1Zf9MAGPCOJTVcHHwlf4lI7d8tSlF/view?usp=sharing, https://drive.google.com/file/d/1rHgVQB2CxXyGGovE47iyi6LrStnpSg5O/view?usp=sharing, https://drive.google.com/file/d/1siPmQ2_rk3fgjzlPOB5ZoPsgSZ6XcFf7/view?usp=sharin