I want to apply ROS2 with the ardupilot copter. Following AP_DDS readme file, I built the firmware with enable-dds option. As you check in the picture, it showed that the if02 directory was not found. But, there is no other error.
I can do SITL gazebo simulation using UDP option. I wonder what’s the problem with the hardware. I found the similar situation (Is it possible to test XRCE DDS on real HW? - #6 by lalal2017).
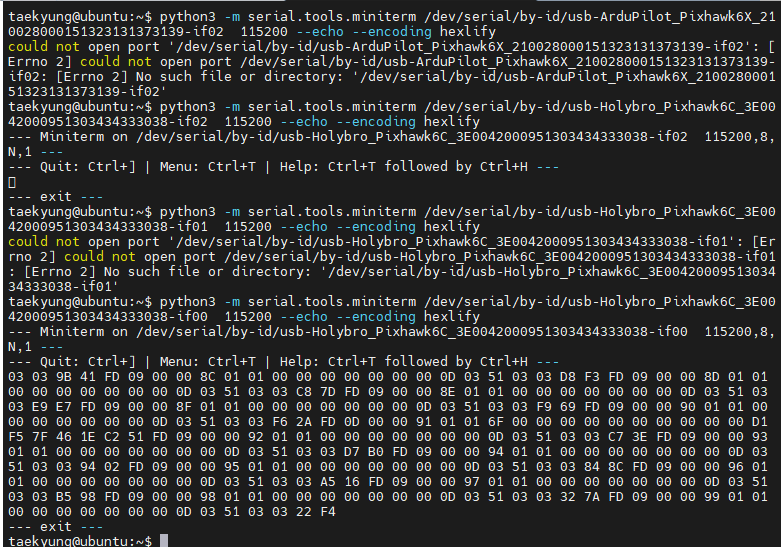
I tested with miniterm. It didn’t show anything on jetson. But, with raspberry pi, it showed some hexa texts, but the MicroXRCE didn’t work.
I just started using the Ardupilot and couldn’t found the resources online.
Someone help me, please.
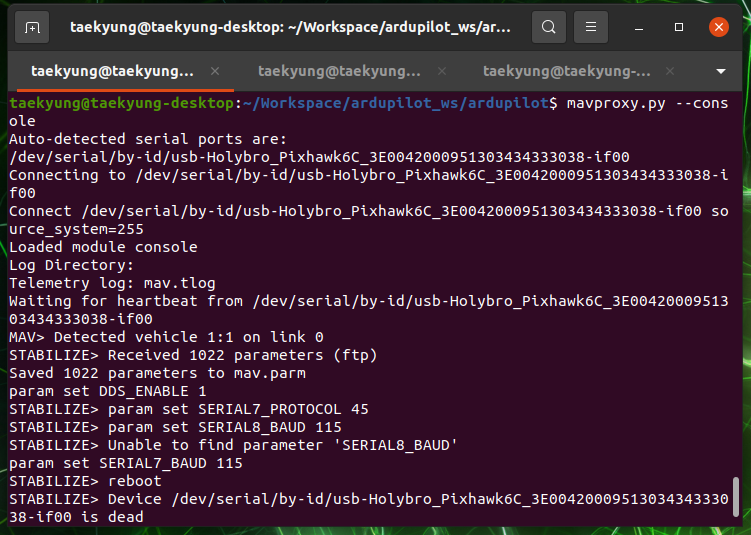
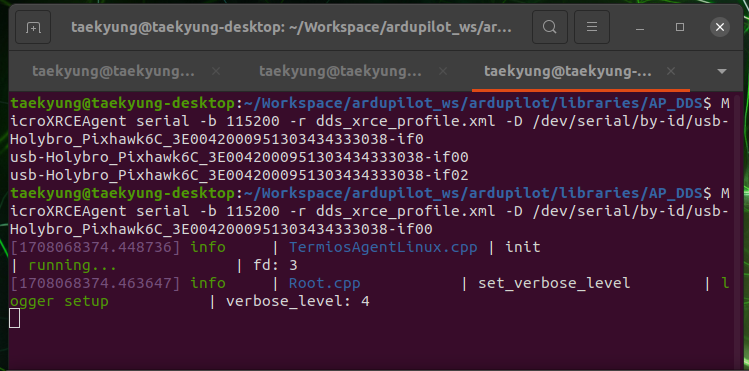
Hello @wntun, It looks like you are trying to connect the micro-ROS agent to SERIAL0 on /dev/seria/by-id/*-if00 which you are using for mavlink and console. You have configured SERIAL7 for DDS which is on /dev/seria/by-id/*-if02, so the micro-ROS agent command should be:
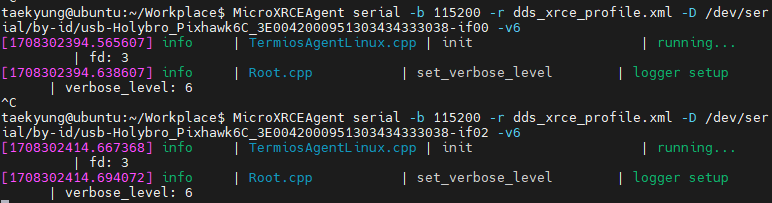
MicroRosXRCEAgent serial -b 115200 -D /dev/serial/by-id/usb-Holybro_Pixhawk6C_3E0042000951303433038-if02 -r dds_xrce_profile.xml -v6
Run initially with the -v6 flag to verify the connection is established.