I’m wondering since a while why my CUAV V5 Nano equipped quad do some strange altitude changes during start and RTL in auto mission
I fly today 4 times the same mission. According to my understanding, the CTUN.Dalt values should be the same for all 4 flights? But it varies from flight to flight…
Question:
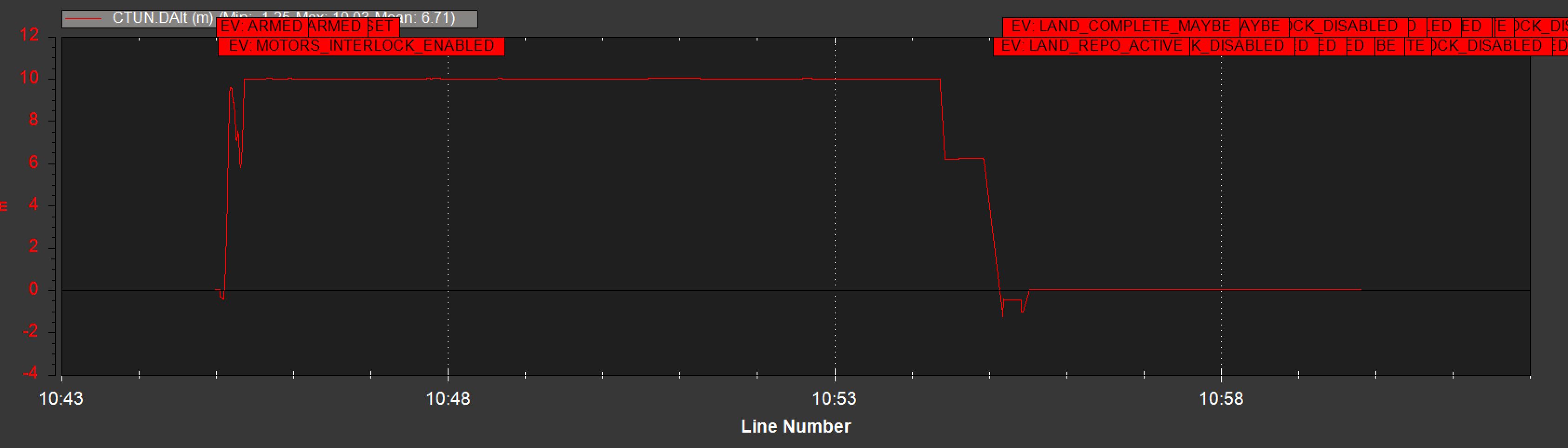
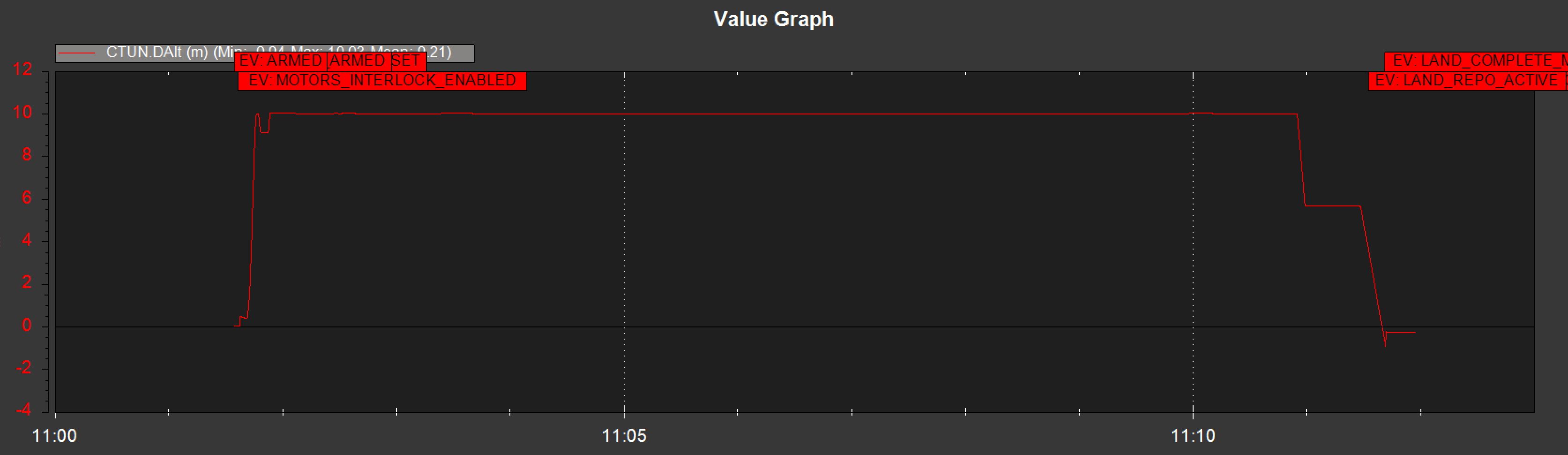
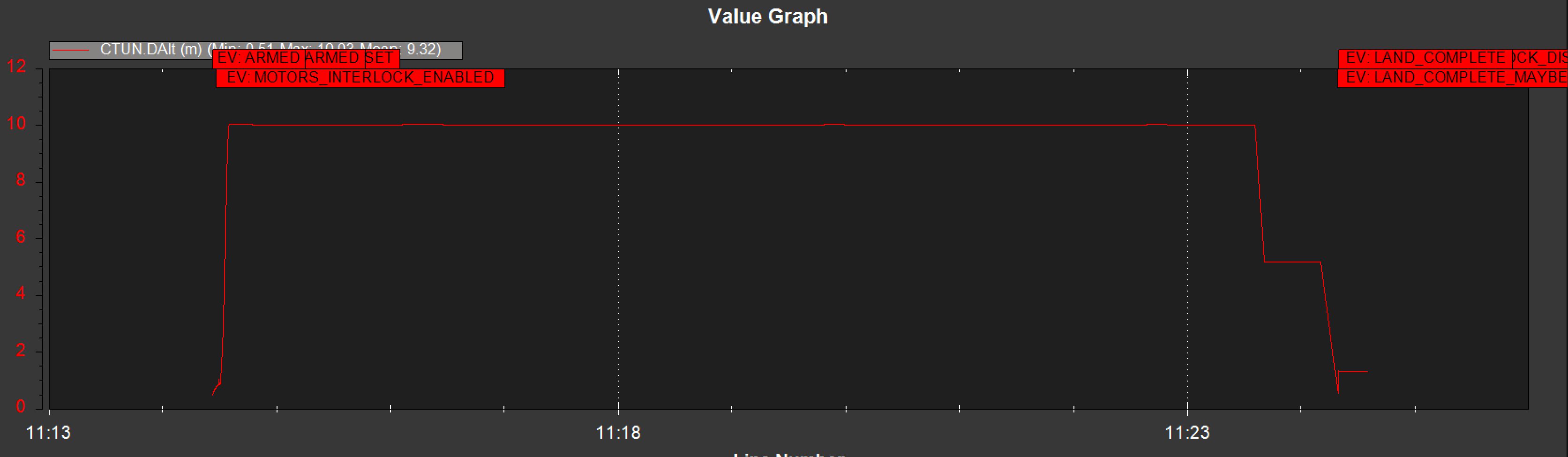
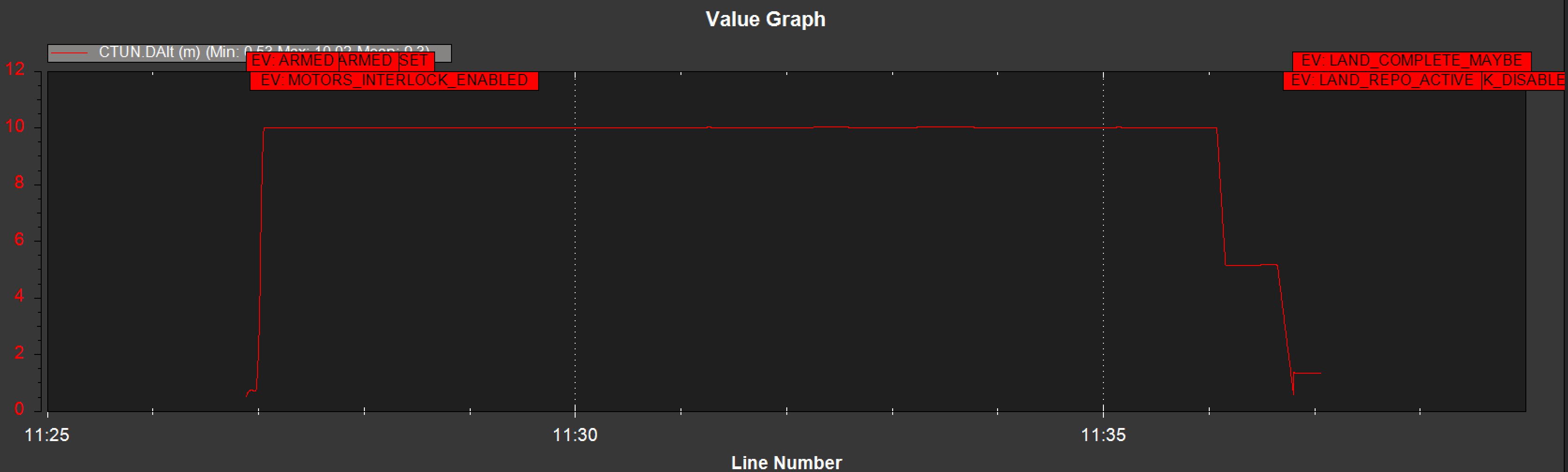
What cause the drop during the start in 119.bin and 120.bin? 121.bin and 122.bin does not suffer from this drop.
Why CTUN.Dalt varies in RTL (5.2m, 5,6m, 6.2m)? CTUN.Dalt during the mission is stable on 10meters
The altitude anomalies at the start are a little like the FC is expecting to overshoot the 10m altitude target (or the RTL alt) and throttles back but then doesn’t achieve the desired altitude - and yet the actual alt is following desired alt.
The only big differences I see between first and last flights are the baro and IMU temperatures - everything is hotter at the start, like it’s been sitting in the sun for a while - but it’s not too hot. Normally we like these things to heat up a little and stabilise.
According to baro the ground temp dropped 1 degree between 1st and last flights. Flying cooled everything off ?? I wonder if weather changed too, maybe less windy as time went on?
Looking through your parameters many are very standard and I think there’s more tuning you could do even though Roll and Pitch are tracking their desired reasonably well. Let us know what props, motors, and ESCs you have. Also take-off weight.
I’d be setting these right away:
BATT_ARM_VOLT,22.1
BATT_CRT_VOLT,21
BATT_LOW_VOLT,21.6
MOT_BAT_VOLT_MAX,25.2
MOT_BAT_VOLT_MIN,19.8
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
Thanks for having a look. I did the flights all in a row, after landing I replaced the battery and up in the air again. The weather stayed very stable over the hole flights, so no big changes in temperature and wind.
Here a few data from my quad:
Takeoff weight: 3.8kg
Motor: SunnySky V4006-320KV
ESC: Hobbywing 4in1, 60A, normal PWM controlled, no DShot or similar
Prop: 16x5.4" T-Motor
Flightcontroller: CUAV V5 Nano
I do the tuning manually, never had great success with autotune. I also set the notch filter. To my opinion the drone fly very stable, I checked the Des.Roll/Pitch vs. the actual Roll/Pitch values and they look pretty good to my understanding.
My biggest question is, why the drone descends on the last waypoint and fly on this altitude back home… I also had the situation, that the drone climbs a few meters… I fly sometimes in areas where those difference in altitude could cause a crash. That’s the reason why I’m concerned about this behavior. I never know if the drone climbs or descends a few meters…