Hi
I have been experimenting with flying a mapping pattern in Auto and using a Lightware SF11 Rangefinder for terrain following and have found that when the UAV flies over broken terrain it aggressively hunts to correct maintain the set altitude.
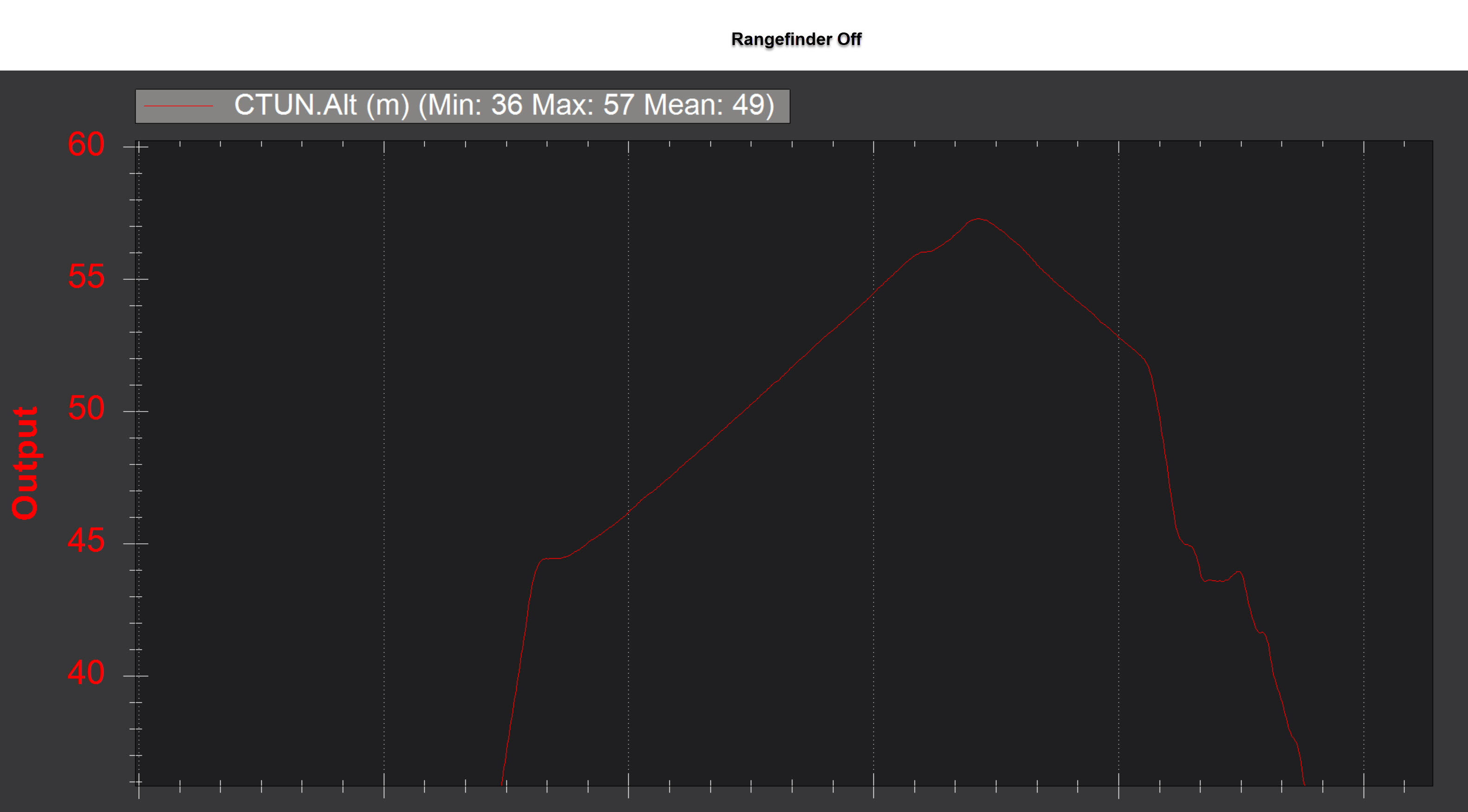
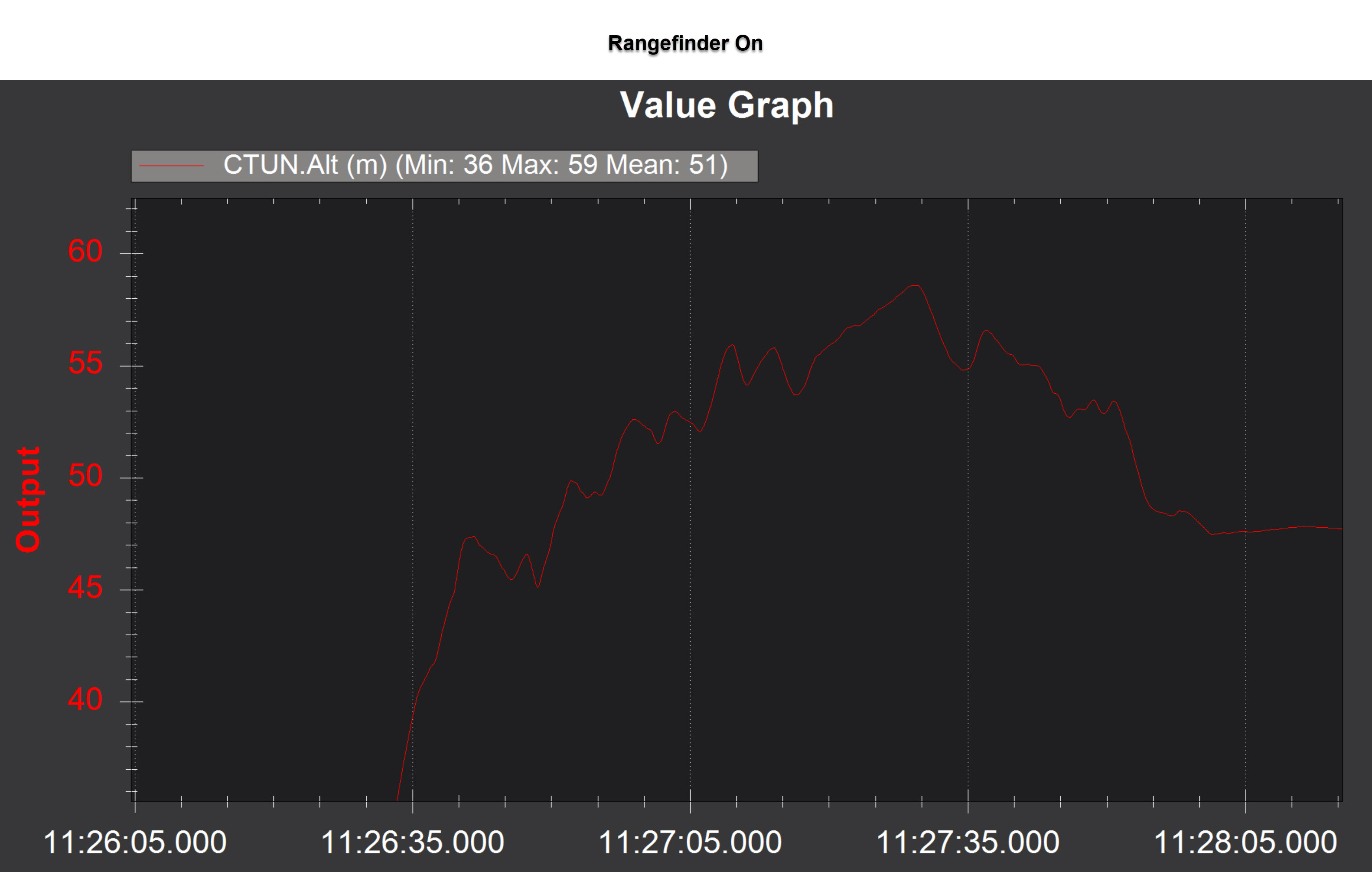
There two images images are of two flights over the same flight path which is up a hill and over some trees and open areas. The frame for altitude has been set to terrain and terrain = 50m. One has WPNAV_RFND_USE set to on and the other off. The other settings are WPNAV_ACCEL_Z = 100 and WPNAV_SPEED_UP =250.
My question is when the rangefinder is enabled, it normal for it to aggressively correct the altitude over broken ground?
Which arducopter version do you use ?
Here you can check my tests and experiences with sf11, looks if it usefull for you https://diydrones.com/m/blogpost?id=705844%3ABlogPost%3A2283337
I’m using the latest version.
Interesting article and thanks for posting it. The SF11 give nice smooth terrain following over smooth terrain but I wasn’t expecting it to be so sensitive over rough terrain. I will post an image of the terrain.
Are you using standard config? check that you can change it, some years than I investigate it now and no remember well how to do it but you can check instructions from lightware page.
Yes standard configs.
What I would like to know is when carrying out an Auto mapping mission is it practical to enable a rangefinder to follow very undulating terrain that can vary up to 4 - 5 meters in a very short distance.
If the answer is yes, then what settings need changing so that the UAV stops aggressively hunting to maintain the correct altitude.
Any guidance would be appreciated.
1 Like
Have you found a solution to reduce this aggressiveness with your lidar?
Unfortunately no. Looks like nobody has an answer?
I’m facing similar problems with a Lightware LW20. I posted it here: Stop & go behaviour during Auto Mission in hilly terrain
Unfortunately no response…
After hours of testing I come to the conclusion that terrain following doesn’t work as it should be… I also have a bug during RTL altitude: Need help for analyzing strange altitude behavior in auto mission
It seems that the alt controller have some bugs…
Hi Michael
Maybe a making a Pull Request for these issues is the next step?
Peter
I allready did a post on Github for the altitude bug during RTL:
Unfortunately also no response…
Michael
That’s disappointing! Looks like you have lots of experience with Ardupilot and you have found a valid issue.
Would Developer Chat be worth looking at?
Yeah, I’m using arducopter since 6 years… Never heared from the developer chat… Where can I find it?
Have you tried reducing the RNGFND_GAIN? It’s default is 0.8. Try 0.6 and lets see another log.