Hello,
Can anyone help me understand what went wrong during my flight and I have a near crash(drone lost height and make a hard land). The drone after a while during auto mission starting oscillating and then lost height and make a hard land. I know I have problem with the height culcalation from the rangefinder because the sensor read values from the spraying cloud and make a lot of up and downs.
Does only this explain this behaviour or is something else (not correct tune).
I attached link for the log file.
https://drive.google.com/file/d/1X8-agK152phsfOvWvBZhNQMEjM87SaZo/view?usp=sharing
Hello Stelios,
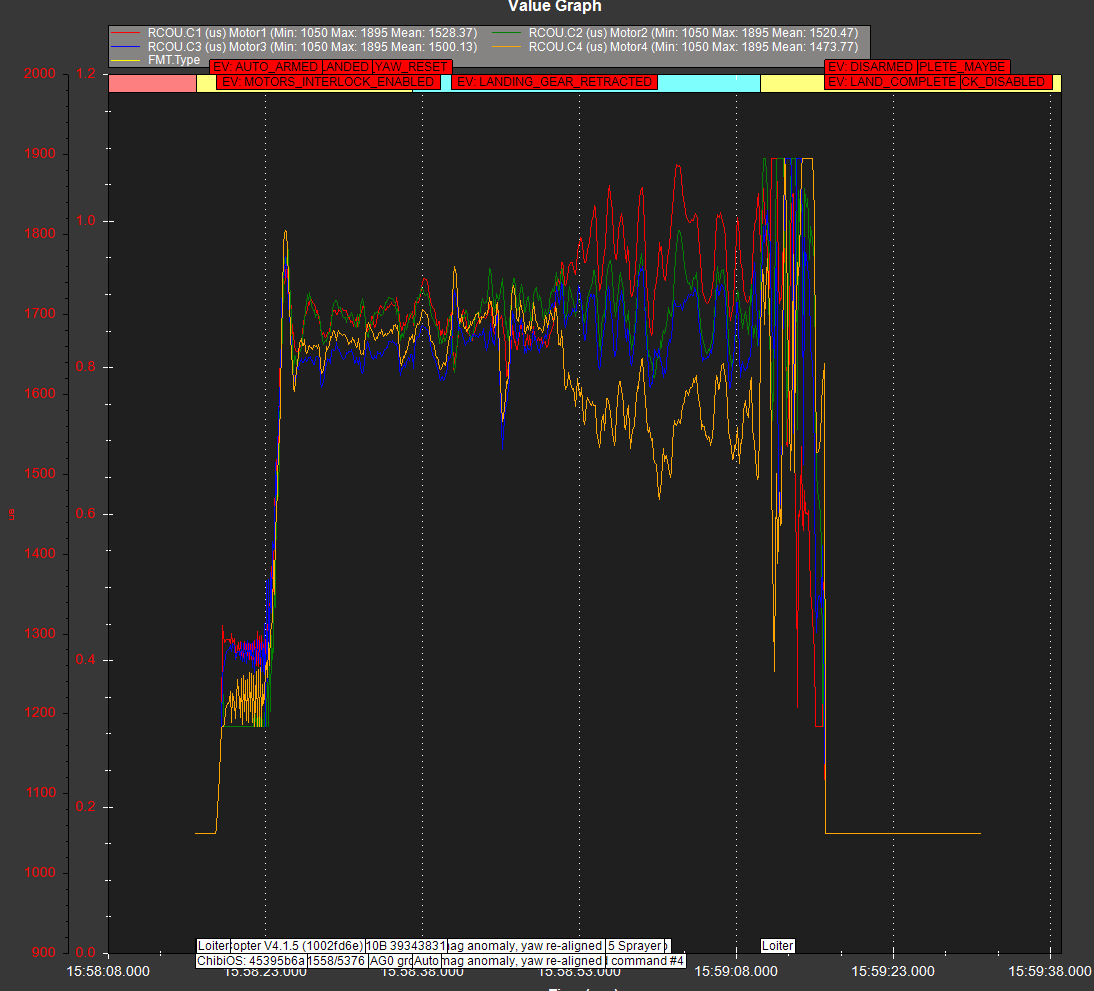
A quick look at the log shows a few things. First I’d fix the rangefinder issue you mentioned as that is not going to help. The tune could/should be better as towards the end you can see desired roll & actual roll getting out of sync completely. Also, vibration levels are oscillating at that point - probably induced by throttle going up/down due to rangefinder issues. You can also see the motor outputs going nuts.
After sorting the rangefinder I would take another look at the tune to ensure the copter is more locked in.

Thank you Peter for your help and time
1 Like
So try a radar-based solution for your rangefinder. There are a couple of them already supported in ArduCopter.
I have already order from Nanoradar to try one.
1 Like
That’s nice, it is a good one.