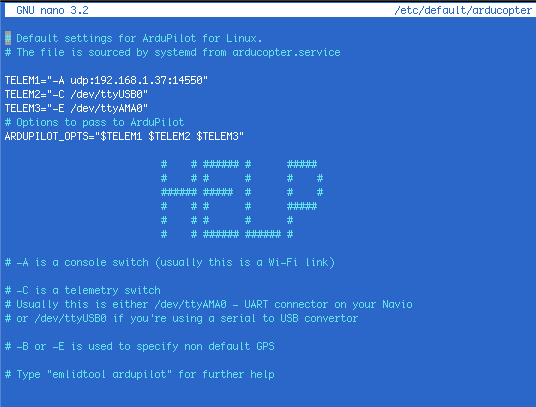
I have the mRo unit plugged into the Navio’s UART port, which seems to require the GPS enabled on Serial4 in MP. I have set the baud in MP and uCenter to 57600, set the GPS type to AUTO, ublox, and NMEA at different times, all to no avail. I then edited the Navio’s etc/default/arducopter file to include TELEM3=“-E /dev/ttyAMA0”, modified the existing (and commented out) TELEM2=“-C /dev/ttyAMA0” to TELEM2=“-E /dev/ttyAMA0”, and no dice.
I’ve tried flipping TX and RX, multiple baud rates, multiple GPS protocols, and all have come up short.
I am simultaneously running UAVCast, and Arduplane 4.0.5
Hello,
I had some history with Navio 2 and 2 GPS.
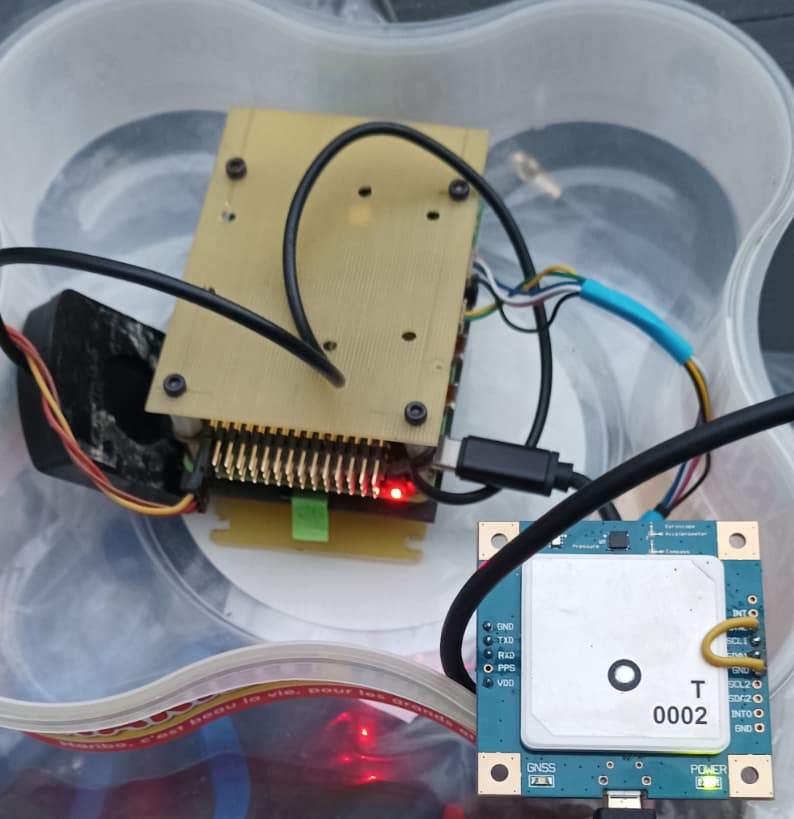
I use arducopter and have a test bed at home (under roof window) with a RPI4
Here is my telemetry setting:
Thank you for the detailed feedback! Happy to know I’m at least exploring the proper paths.
Following your /etc/default settings, I have:
TELEM3=“-B /dev/tty/AMA0”
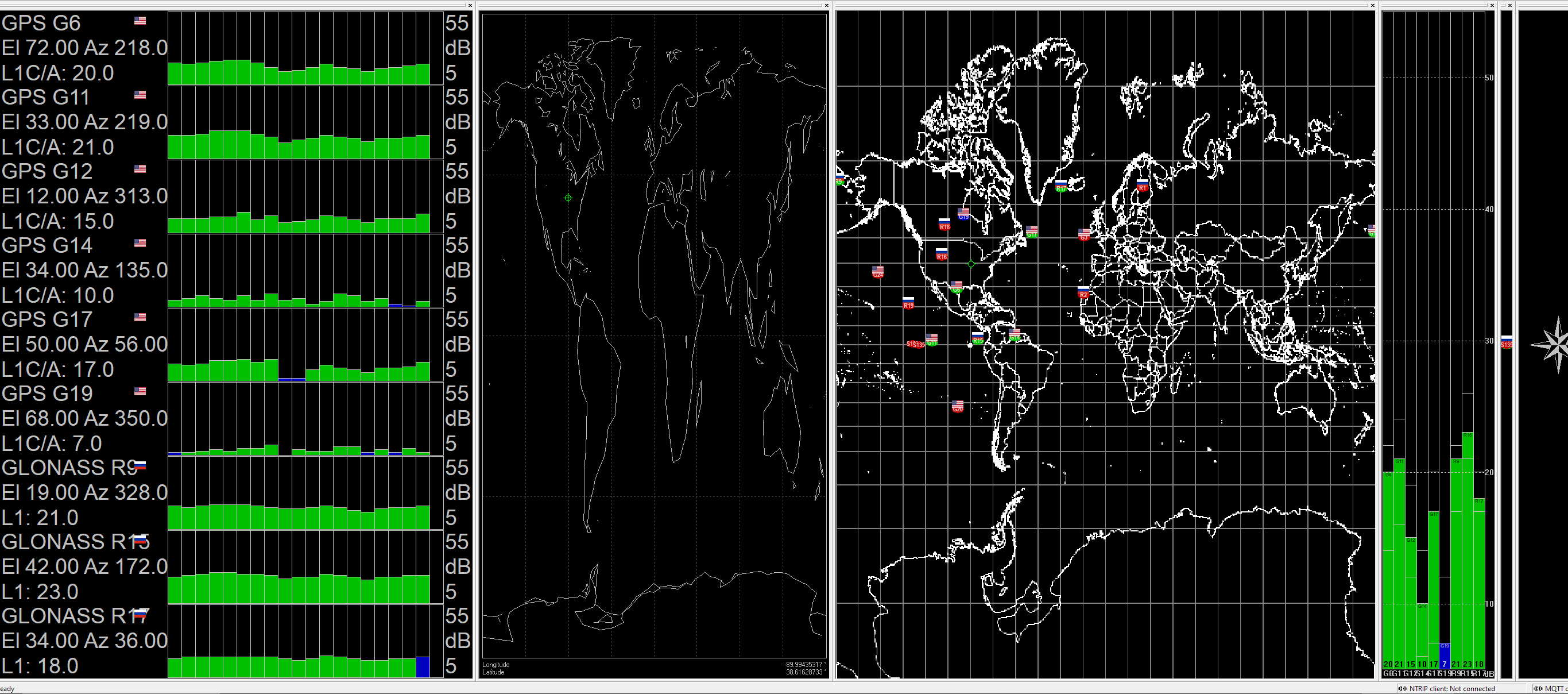
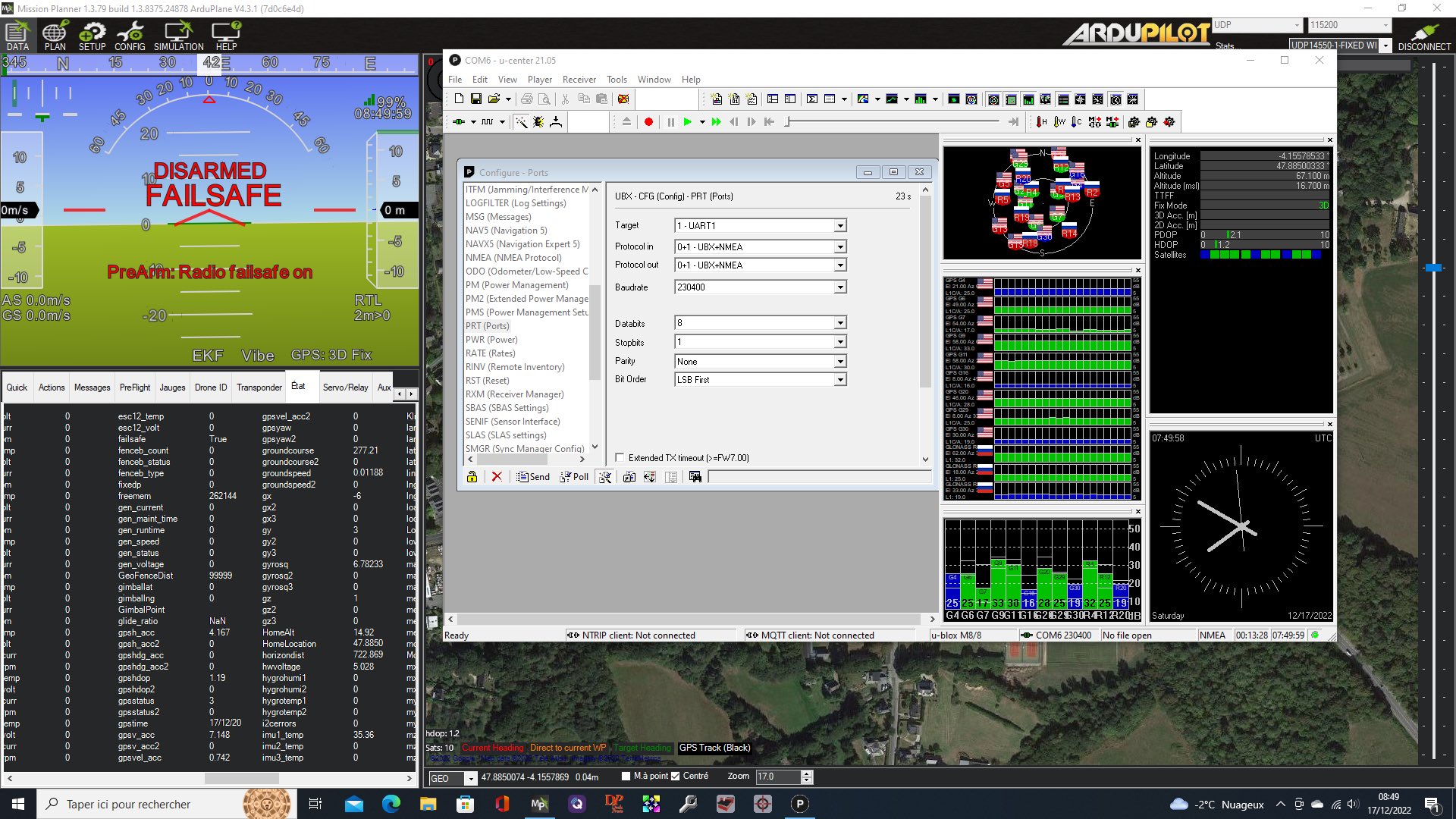
I then went into uCenter and changed the M8N default UART1 baud to 230400, ensured serial3 in APM was set to 230 (it was 38), and made sure the serial type was 5 for GPS.
I still have the internal GPS detected as GPS 1 at 115200 baud.
I’m still working with the older version of APM Plane for now, but I guess that’s my next avenue. Did you also have to change baud on both the APM serial side and the GPS itself?
Thank you again. I followed your steps for updating Arduplane from another thread, so cheers for that!
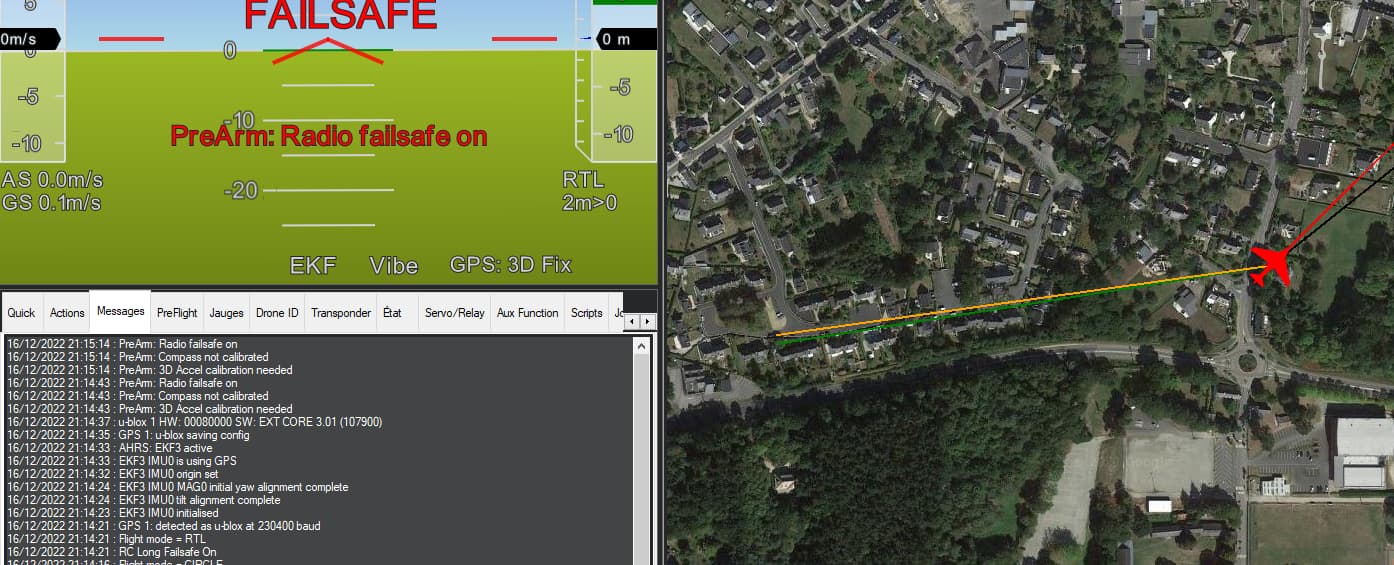
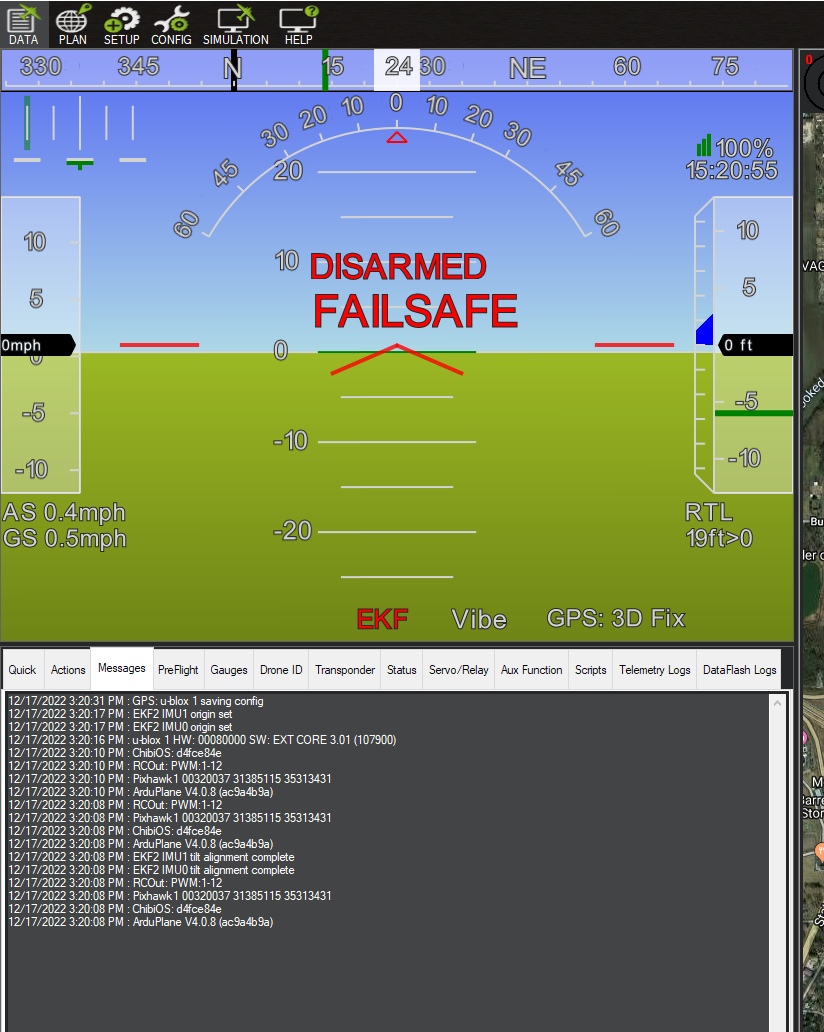
I’m afraid the issue persists. I just now thought to plug in the external GPS after boot, and it doesn’t appear to grab. The internal, however, shows just fine. Is it possible my default/arducopter isn’t correlating? I presume I need to edit that instead of default/arduplane?
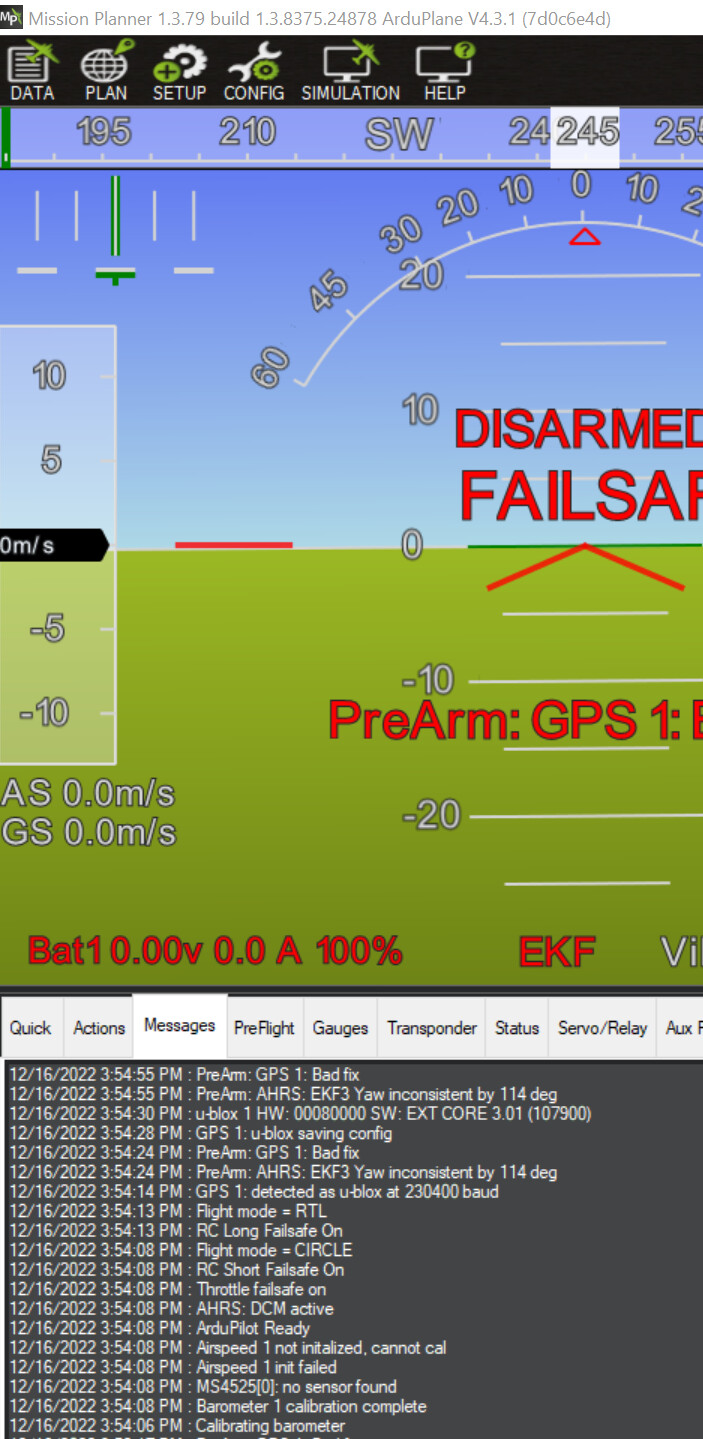
Here’s the output of plugging in after boot, top pane included to prove APM 4.3.1:
EDIT:
I later swapped to a different uBlox based GPS and have the same issues. It appears I can’t switch off the internal GPS, and/or cannot connect an additional.
To further eliminate variables, I just created a fresh Navio install and started from scratch to rule out UAVCast, same problem. Surely the board can’t be defective, but I don’t know where the discrepancy lies between our setups. Is it possible for you to send me a config file and some details on your second GPS?
Alright I invoked some interesting behavior. I disabled GPS1 type and left GPS2 active on Serial3 at 230 and GPS type set to 2 (ublox). Upon reboot, I finally have two GPS statuses in the HUD, but it only detects GPS 2 now, and it’s unclear if that’s the external or internal because both are ublox. I went back and once again set GPS1 to 2 and it made the GPS2 in the HUD disappear.
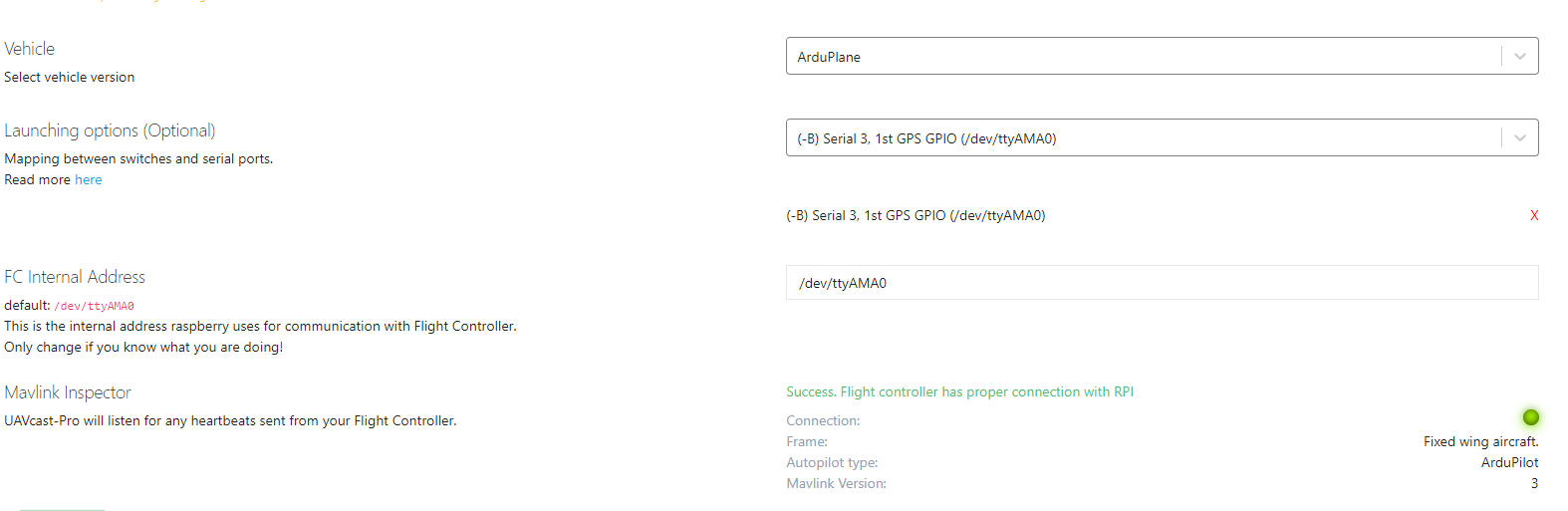
This is the first time I even noticed them, so I decided to enable the GPIO for the first GPS, and sure enough it worked. The reason I’m confused about this is because I did a fresh install of Navio without UAVCast and had the same problem we’ve been fighting.
Regardless, thank you so much for your help, @mlebret, as your config and constant feedback probably got me to the point where the launch option even became a solution. Many cheers and happy flying!