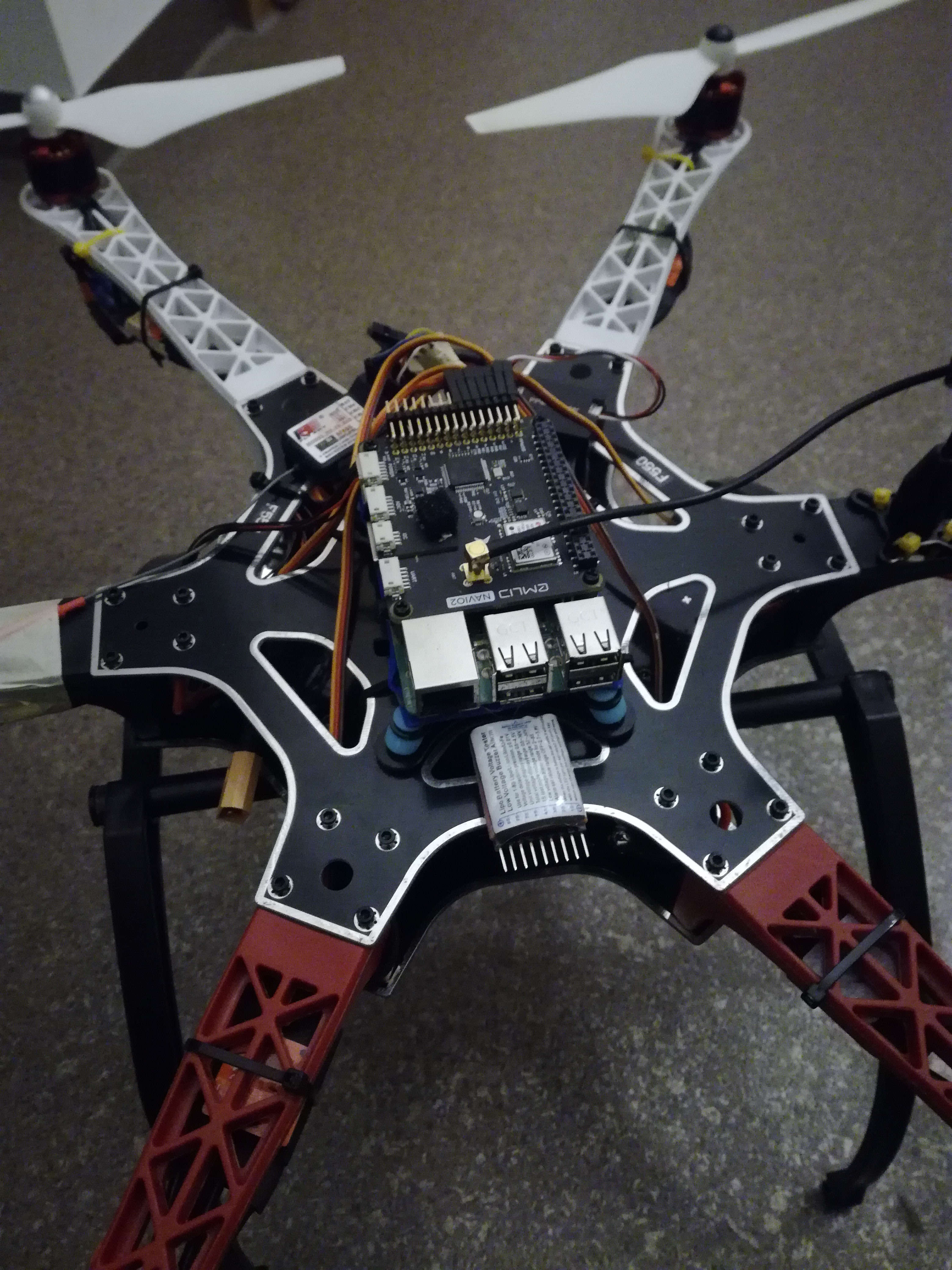
I am using my navio2 with RP3B and Arducopter 3.6.5.
Everything works fine, and when switching to Position Hold, the quad doesn’t stay still in the same altitude, if flies up and down all the time, and I have to control the throttle all the time if I want it to stay in the same altitude.
Is that something normal given the sensors? I would expect the drone to stay in the same position including the altitude.
It always helps to upload a .bin file from the FC so we can see what is going on.
I think you have position hold confused with Loiter.
In Position Hold you have manual control of the throttle, so yes, it will change altitude.
What is your altitude Hold and Loiter like?
What level of vibrations is the FC experiencing?
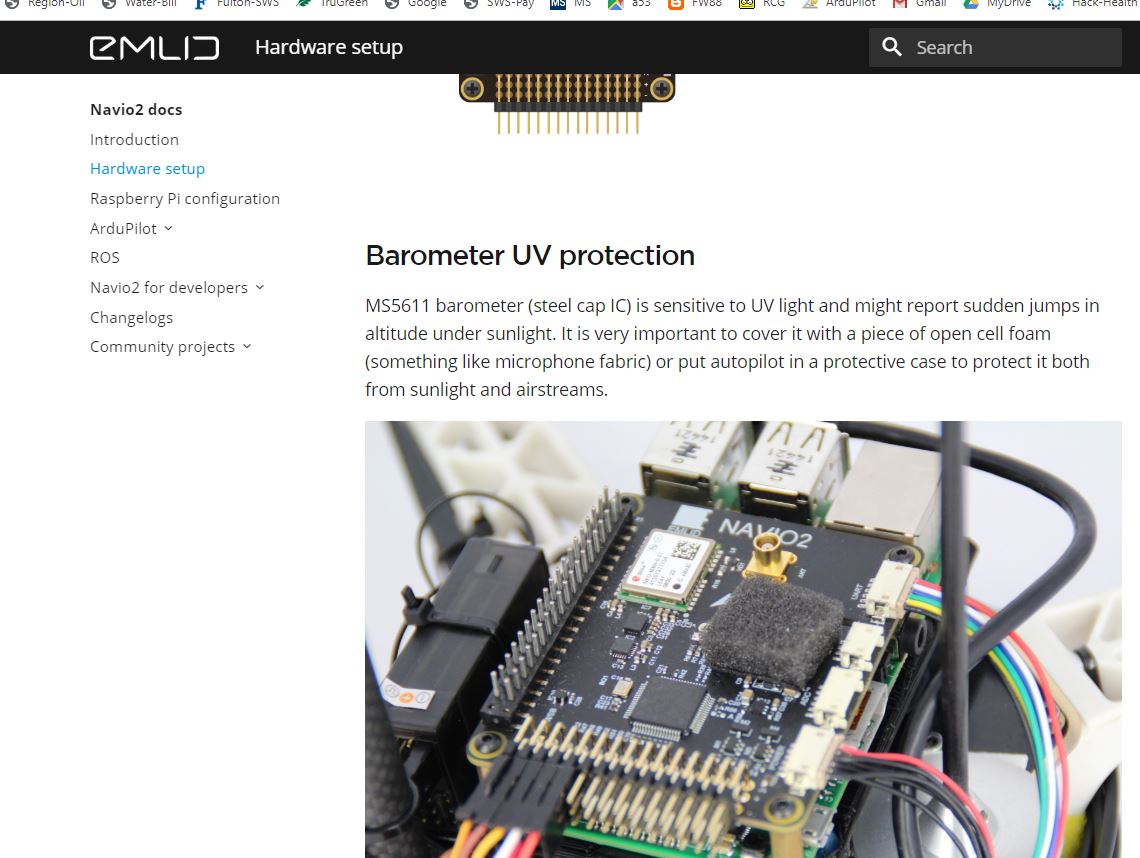
thanks for the replay. I actually have have foam. Probably I should check if the barometer has defect. This brings mi to the next question. Is the altitude solely depending on the barometer, I would expect it to use the gps or fuse gps with barometer.
thanks for the replay. I will try to produce a .bin. I will also test Loiter and AltHold and tray to make a video. Nevertheless, the amplitude and frequency needed for trying to control the altitude is so big and different, that I can hardly imaging that the Position Hold needs this amount of extra control on the altitude. I would expect the FC to use the a filtered alt from the gps (as I suppose it is done with the altitude and longitude) and perhaps fuse it with the filtered barometer to let the quad fly stable at the same position (including the altitude with +/- 1meter, but not 5meters oscilations).
Yeah, from the video it looks like the flight controller is not respecting altitude data at all.
How is the piece of foam attached over the barometer chip? Looks like you may have stuck it with a blob of glue that may be blocking the vents in the chip’s case.
I guess that was the problem. I had a double-sided tape apparently closing the vents. I got rid of it, and put a new one only around the sensor for the foam. It stills drifts a bit, but I guess that is normal.
What would be you recommendation to improve the altitude hold, a ranger?
That looks a lot better now. A little drift is normal.
While the barometer works surprisingly well, a rangefinder adds a very accurate altitude input for holding position. I’ve used the TFmini unit and it worked reliably for me over grass up to four meters altitude. There are many others (much more expensive) that can accurately measure at higher altitudes.