Have a problem with output pwm on Navio2, then disarmed.
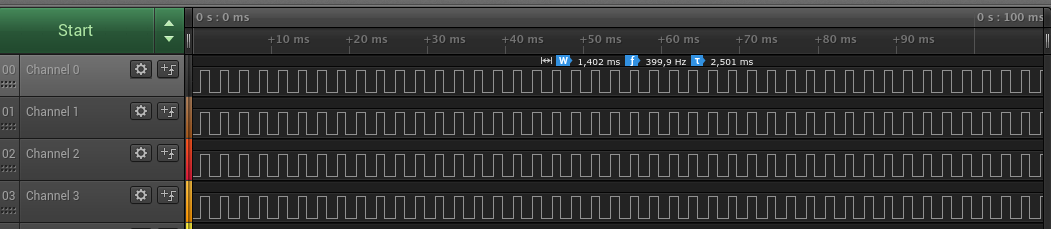
On version ArduCopter-quad 3.4.4 all is good:
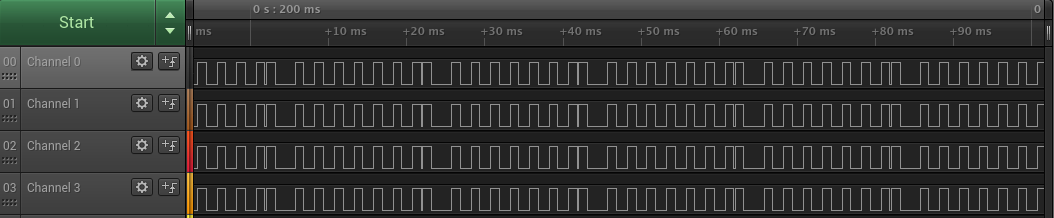
On version 3.5rc-1 after reset parameters to default and set Quad Frame Class have erratic pwm:
Have a problem with output pwm on Navio2, then disarmed.
On version ArduCopter-quad 3.4.4 all is good:
Is that after a reboot too?
I can confirm that after a reboot the problem is still there.
I have a Navio 2 with Hexa configuration and PWM is corrupted even when motors are not armed. There are running as soon as ESC are inititialised.
RC out value in Mission Planner Status window stay at around 1050 (no fluctuation) but motors are running variable low rpm with kracks.
Marc
Thanks, I’ve moved this to it’s own topic so we can track it better.
@staroselskii any idea on this? I’m only seeing one change to the RC output used in the Navio2 and it looks correct.
Thanks for the input and testing guys. The fix has been tested and is on the way to be deployed. As soon as this PR is merged, the issue will go away.
Great, thanks for the feedback!
I have this same problem with 3.44. Motors chattering while disarmed with spurious spinning and cracks.
Thanks,
Paul
Note that I experience the problem with pwm, one shot, and oneshot125.
Should be fixed by now.
sudo apt-get update && sudo apt-get upgrade
This will do.