I changed the parameters according to these the wobbling is reduced than last time but there is still wobbling.
https://drive.google.com/drive/folders/1RERfipzhrxE1MAIU9272o_VkNSnAhWTT?usp=sharing
the log and video
Fc is mounted on a damper
yesterday i changed the damper to a thicker one.
I again tested with another cube orange, with a good thick damper.
i changed the parameter according to the previous values given by Shawn
https://drive.google.com/drive/folders/1MU8P8ZOVCiTfThhVFlziWad4T1I5I1ta?usp=sharing
the log and video
i changed the fc with another cube orange and this time i used good thick damper and put these parametrs in it
the wobbling was still there but it was little bit better.
https://drive.google.com/drive/folders/1MU8P8ZOVCiTfThhVFlziWad4T1I5I1ta?usp=sharing
the log and video
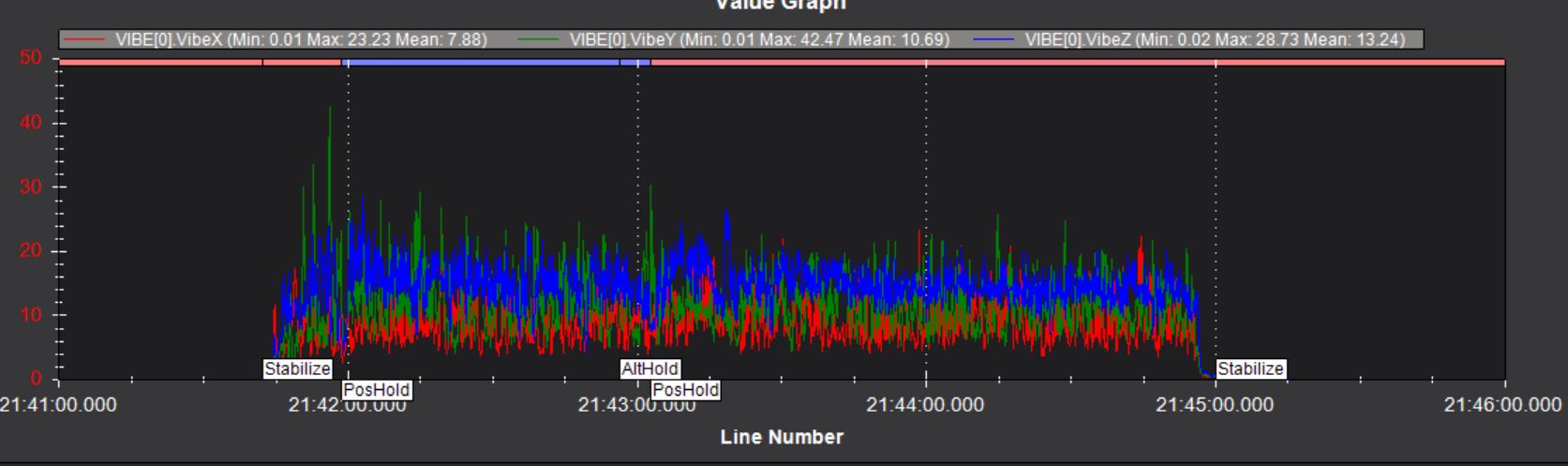
You have far too much noise on roll:
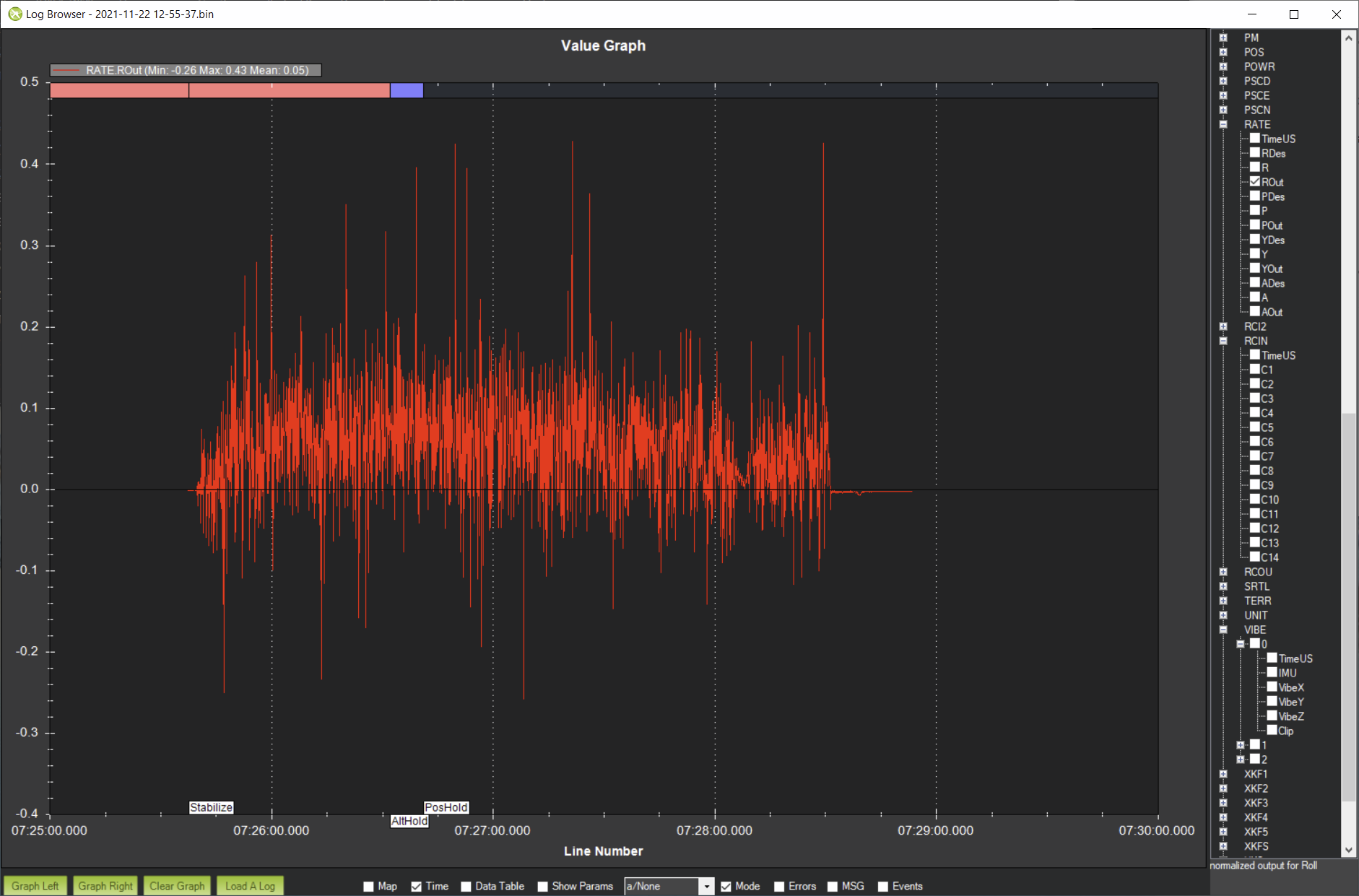
It looks like you are flying on default PIDs, autotune will do a better job of this for you I think.
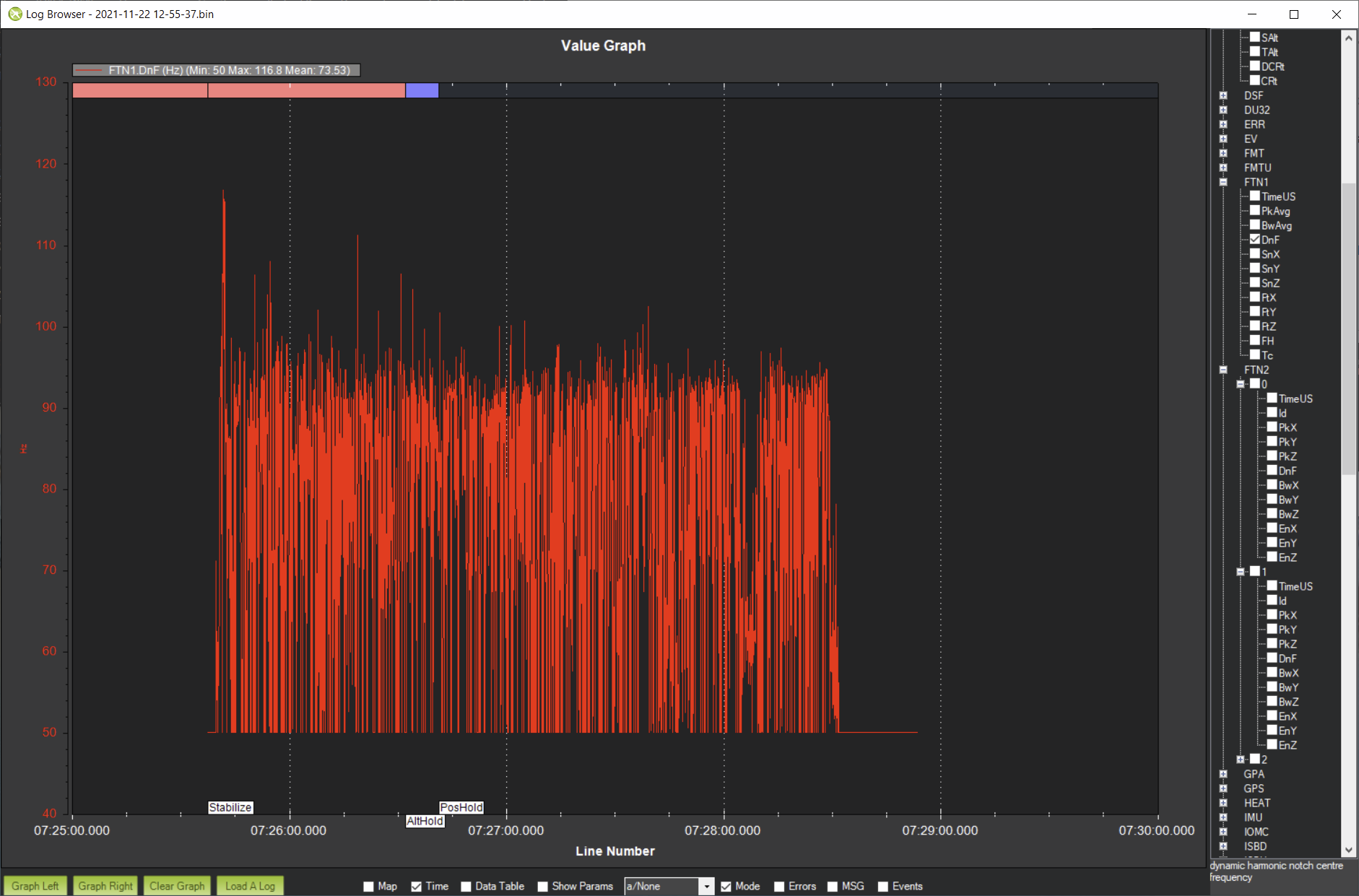
The FFT is doing a poor job of tracking the noise:
You are using a CubeOrange so try increasing FFT_WINDOW_SIZE to 128. Also try setting FFT_SNR_REF to 15 to see if that picks up the noise more clearly.
1 Like
I tried to autotune but every time it fails.
ok I will try increasing FFT_WINDOW_SIZE
and FFT_SNR_REF, and get back to you
I tested the drone by changing the FFT_WINDOW_SIZE and FFT_SNR_REF
it was a bit improved but still, it wobbles in poshold.
https://drive.google.com/drive/folders/1MMuGx6SxfT1JiuQL2G2k4RDtSyKItdUW?usp=sharing
the log and video.
I think you could try FFT_WINDOW_SIZE at 256. It is looking better and Y is tracking particularly well - so you could try setting FFT_HMNC_PEAK = 5 to track that only.
BUT if you look at the FFT:
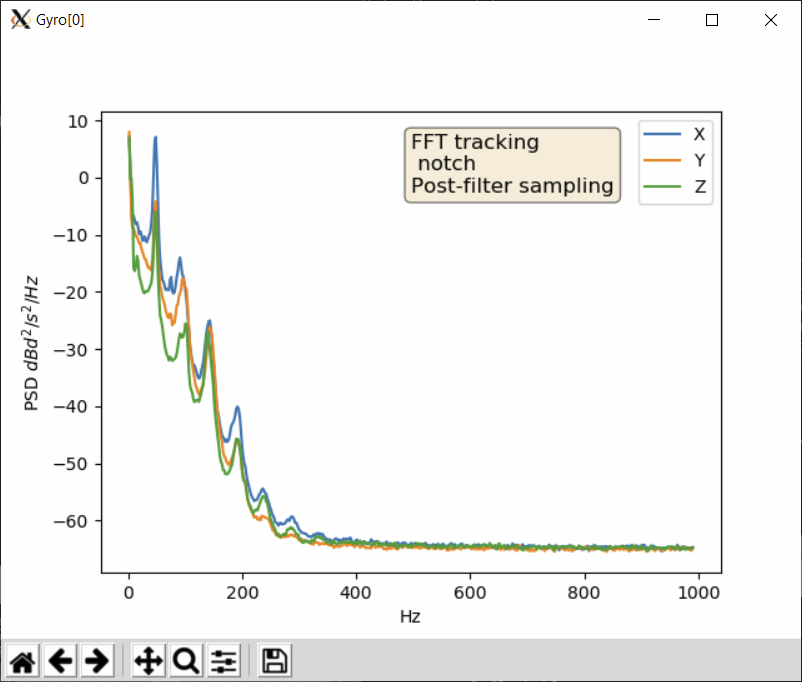
You will see that there is an enormous noise peak at 48Hz which your dynamic FFT is not picking up. I think to address this, drop FFT_MINHZ to 35 to make sure and set INS_HNTCH_OPTS=2 so that the notches are tracking the peaks individually
1 Like
thanks for getting back appreciate it
i will set this up accordingly and get back to you with the logs and video.
I tested the drone with the changes you told . the wobbling reduced than last time .but there is still a bit of wobbling issue in posHold.
https://drive.google.com/drive/folders/1SMOv75UqhLvCwBmD89hTK6bUOOp5PJHn?usp=sharing
the log and video
Looking better but still struggling to find the first harmonic - its preferring the 3rd and 4th. Try setting FFT_MAXHZ = 175, that way you will stop it searching for the fourth harmonic. This may not work so well at higher RPMs, but we shall see
1 Like
I tested it again with FFT_MAXHZ to 175 the result was better than last time.
but there is still a bit wobbling.
https://drive.google.com/drive/folders/1NmVgxfmpL85c4bOt8j7nWsDzllL7w16z?usp=sharing
the log and video
First time the drone toilet bowled on position hold but after that it was holding position
It’s looking a lot better. Still struggling on that first harmonic, but I am out of ideas of how to improve that for now. I suggest you see if you can do autotune now. You might find that you get better results with the throttle-based harmonic notch on this copter
1 Like
thanks for the reply
I tried autotune but after autotune it wobbles again
https://drive.google.com/drive/folders/1k5cnDkAVrWBP1kfGGabRZyt7Ye9dmjzf?usp=sharing
Is there anything else that i can do to improve its flight?
And there is toilet bowling issue.
ATC_ANG_RLL_P is 3 - so roll is the problem. Pitch and yaw do not look too bad. My guess is that it is still because it is not tracking the 48Hz fundamental. Why not try isolating just that peak? Set FFT_MINHZ = 35, FFT_MAXHZ = 80 and set INS_HNTCH_OPTS back to 0 so that you get the harmonics. The problem with this approach is that when you throttle up you will likely go outside the frequency range, but it depends what you flight looks like.
1 Like
I tried with changing these values the result was not very significant.
https://drive.google.com/drive/folders/1jsDdbSbpqb9UEMDQKL0SzPcjAC7quNLw?usp=sharing
the log and video
i faced kind of similar problem before with lot of noise of the motors, the reason that i was using a damper for the cube orange, you need to hard mount it , after that the problem gone.
good luck
1 Like