Hi
i finished my 800mm size quad with cube orange and here 3. the drone is flying good in Alt hold, and stabilize. but when I change the mode to pos hold the drone starts to wobble. I tried autotune but it still wobbles .iam using a 17-inch prop.
https://drive.google.com/drive/folders/19ggOfTQcDmau6RPgUBfn1sKUNoC4Hfo4?usp=sharing
the log and video of the quad are on above, please help
Hi @Christo_George
it seems that your copter is miss tuned you can see this problem on PIDs graph
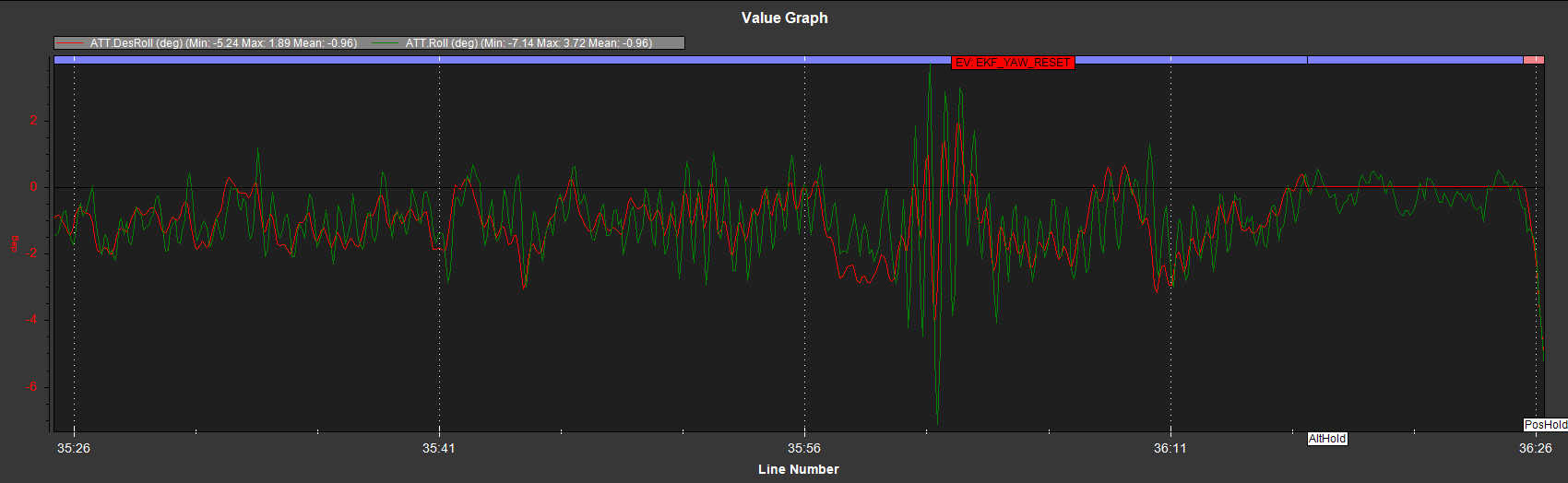
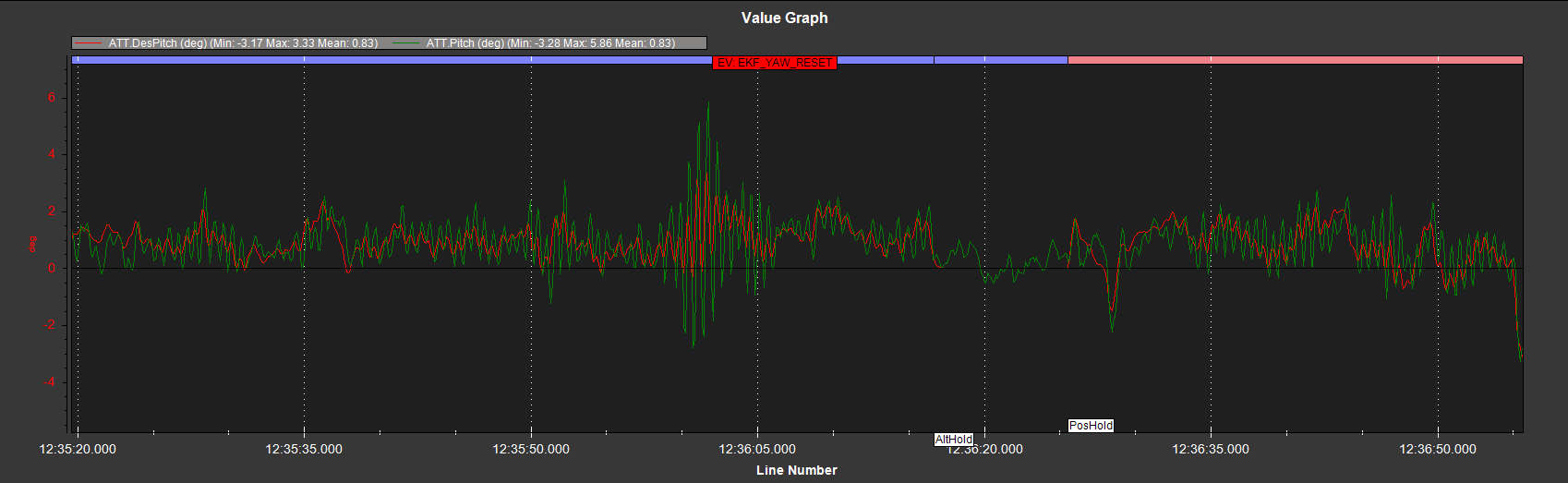
but before tuning your copter you need to resolve noise problem
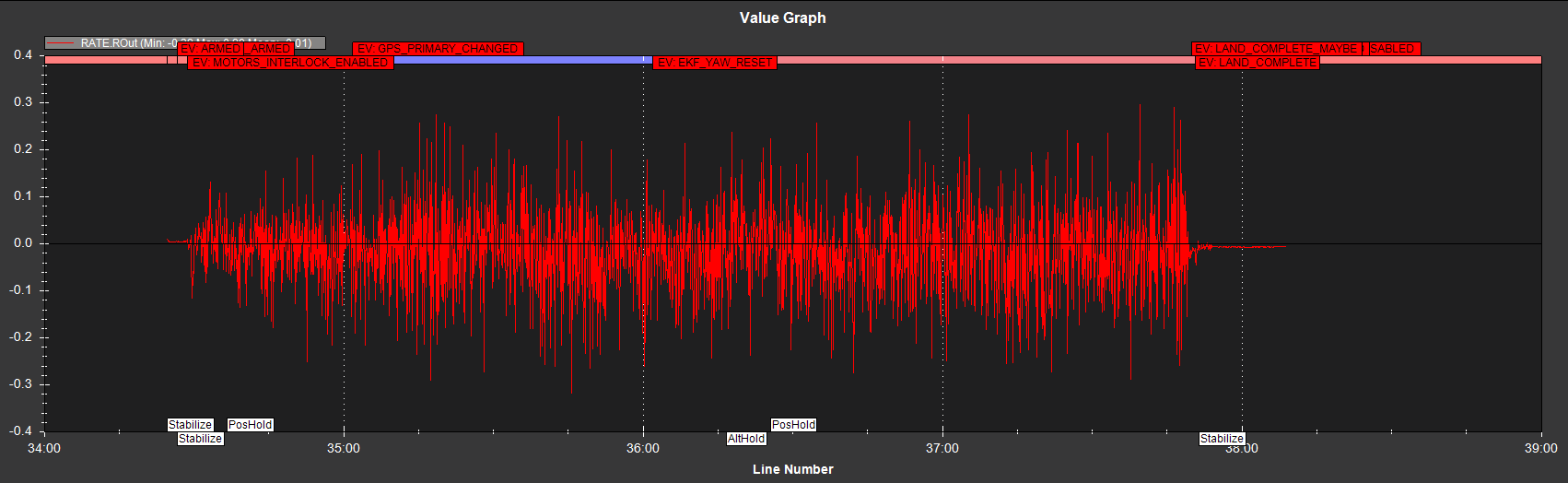
you can see this noise on your rate values

first fllow tuning process instruction then configure harmonic notch filter to eliminate gyro noise
and finally run auto-tune
1 Like
thanks for the reply,
I will go through the tuning process and also configure harmonic notch filter.
Is there any way to calculate the right PID values according to prop size ?
maybe a spreadsheet would really helpfull.
I tested the drone again with some changes on PID its bit improved
https://drive.google.com/file/d/10WSt3sFuvyQGqGrdJUgugGVewf4_7jL8/view?usp=sharing
i will go through the harmonic notch filter and get back
Yes and no because in fact pids are more depend on thrust to weigh ratio than prop size
In a copter with more thrust to weigh ratio PIDs will be low and in a copter with less thrust to weigh ratio PIDs will be higher so with a copter with bigger propeller you will have more thrust so PIDs will be low
1 Like
ok i will go through that and get back
Set these:
- PSC_ACCZ_I to 2 x MOT_THST_HOVER
- PSC_ACCZ_P to MOT_THST_HOVER
Then configure the Dynamic Notch Filter and run Auto Tune.
1 Like
Following this issue.
1 Like
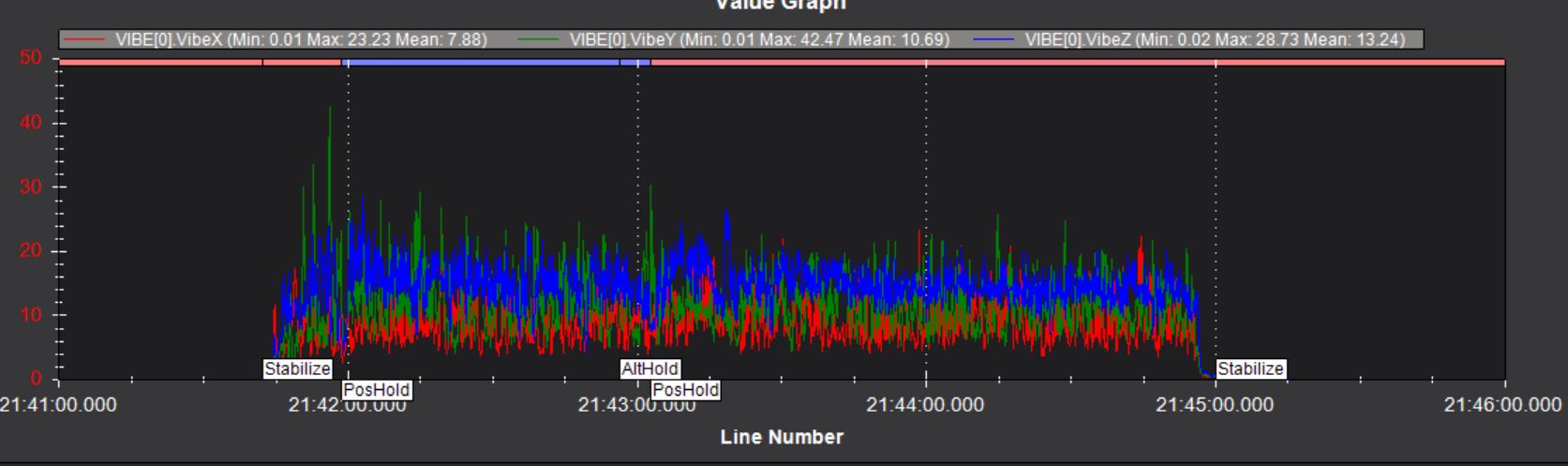
Your Y axis vibrations are bad, so either something is rubbing against or pulling on the flight controller, or it’s damping system is not equal in all axis. Sort that out first.
Your GPS update rate is a bit all over the place, it’s probably not an issue right now but this might help
GPS_GNSS_MODE,65
GPS_GNSS_MODE2,65
and set BRD_BOOT_DELAY,5000 when using CAN devices to ensure they startup before Ardupilot
Being Cube Orange there is plenty of CPU power to use the live FFT to drive Harmonic Notch Filter, set these. You need to reboot or refresh params after setting the ENABLE ones in order to set the others
INS_LOG_BAT_MASK,1
INS_HNTCH_ENABLE,1
FFT_ENABLE,1
FFT_MINHZ=50
INS_HNTCH_MODE=4
INS_HNTCH_REF=1
INS_HNTCH_FREQ=50
INS_HNTCH_BW=25
After fixing the vibration issues and changing these parameters, lets see the .bin log from some hovering and gentle movements (no aggressive acrobatics required)
1 Like
ok i will do that and get back to you
I changed the parameters accordingly and checked the FC and damper it was all clear and tested the drone but still, there is a wobbling issue.
https://drive.google.com/drive/folders/1R6BnOdxqs8xbaN2pWdFALGVcbsfLyzjd?usp=sharing
the log and video.
I changed it and tested it again but it say auto tune failed to level.
https://drive.google.com/drive/folders/1R6BnOdxqs8xbaN2pWdFALGVcbsfLyzjd?usp=sharing
I tried tuning it and configured harmonic notch filter accordingto the values given by xfacta but there is still wobbling in position hold
Vibration levels are still too high. Also the 1st mode seen on the FFT graph is ~46Hz so you will have to lower FFT_MINHZ to cover it.
1 Like
Try a test flight after setting these, be cautious about take-off, if oscillations a bigger or worse than before land immediately and reduce ATC_ANG_RLL_P and ATC_ANG_PIT_P to 6.0
ATC_INPUT_TC,0.2
ATC_ANG_RLL_P,8.0
ATC_ANG_PIT_P,8.0
ATC_ANG_YAW_P,5.0
ATC_RAT_RLL_P,0.11
ATC_RAT_RLL_I,0.11
ATC_RAT_RLL_D,0.0055
ATC_RAT_PIT_P,0.11
ATC_RAT_PIT_I,0.11
ATC_RAT_PIT_D,0.0055
ATC_RAT_YAW_I,0.075
ATC_RAT_YAW_P,0.75
FFT_MINHZ,40
INS_HNTCH_FREQ,40
INS_HNTCH_BW,20
INS_LOG_BAT_OPT,2
EDIT: and Dave says, vibrations are still a bit too high.
1 Like
And set these too
GPS_GNSS_MODE,65
GPS_GNSS_MODE2,65
1 Like
I reduced the FFT_MINHZ to 40 as per the parameters given by Shawn and tested the drone again.
the wobbling is reduced than last time but there is still wobbling.
https://drive.google.com/drive/folders/1RERfipzhrxE1MAIU9272o_VkNSnAhWTT?usp=sharing
the log and video.
I changed the parameters according to these the wobbling is reduced than last time but there is still wobbling.
https://drive.google.com/drive/folders/1RERfipzhrxE1MAIU9272o_VkNSnAhWTT?usp=sharing
the log and video
Fc is mounted on a damper
yesterday i changed the damper to a thicker one.