Does anyone know what you do when the motors aren’t spinning at the same rate? I use the orange cube FC, TMotors for a quadcopter with a Herelink air unit. I did all the calibrations and everything is levelled so I want to know if it’s a hardware issue or another issue in the parameters or QGC
When are they not spinning at the same rate? When doing motor tests via GCS? When raising throttle on your Tx on the bench without props attached? In the air?
When doing motor tests, When I check on Mission planner it looks like two motors have lower speeds after 5 seconds of throttle up. I was afraid of taking off with props on as the motor test shows that it keeps on maximum thrust even after centring the joystick or even throttle down. All the parameters are fine and all calibrations have been done.
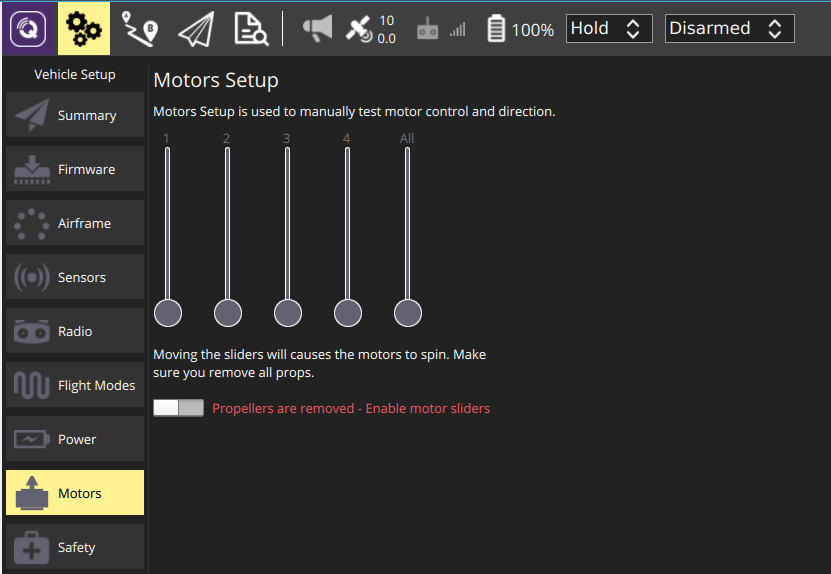
The only thing that matters at this point is if they spin at the roughly same rate when testing them through your GCS, i.e. here:
If you apply throttle on your Tx the FC expects torque to be applied to the vehicle, which won’t happen without props, so it raises RPM output. Depending on the attitude of the vehicle this won’t be distributed evenly across motors. You’re basically giving your FC a command it can’t execute.
I tried with propellers on as well and there was still an issue especially when you take off you have to manually throttle down to be able to bring the speed down which can also be risky since it drops down very harshly. And there is a sound coming from the props that is odd because the speed rates are different
Can you post a logfile of this happening?
This doesn’t sound like you are using Mission Planners (or QGC’s as @Oli1 suggested) Motor Test function if you are using the Transmitters Throttle. That will not tell you much of anything.
Page down to Motor Test Motor Test
2 Likes
Thank You, I tried using the mission planner motor test and all the motors are okay with 50% throttle and 20 seconds. But when it is tested with arming using the remote controller that is when there is an issue.
There is no issue. You are making an erroneous assumption that many do that don’t understand how closed loop control works.
Move along and continue with configuration.
1 Like
Which configuration if you don’t mind me asking? I am fairly new to this so bare with me.
I am just worried if i add the props and i arm the drone when i throttle up it might go up without control and cause an accident. Since it has hovering issues, When you throttle down it comes straight down without stop.
Read all of this:
https://ardupilot.org/copter/docs/initial-setup.html
And all of this:
https://ardupilot.org/copter/docs/flying-arducopter.html
Then all of this:
Then go through the last link again and configure your drone step by step.
1 Like
Alright Thanks i will look into it and tell you how it goes
This is the link to the log
The ArduPilot Methodic Configurator software produces a lot of *.param files and one vehicle_components.json file.
Those are the files you need to post in a .zip here
Hello Oli, So I tried flying with the props on and it seems the drone was corresponding well with the remote regarding the pitch roll and yaw but was not stable and there was an accident, I suspect the motors still aren’t spinning at the right time. Here is the log for the file if you can have more input on it 2024-05-31 14-43-07.bin - Google Drive
No evidence of that. One problem is while you were screwing around without props it learned a very high hover thrust value and you were flying in Loiter here. Set MOT_THST_HOVER to 0.26 and try again. Hover in place for a minute or so in AltHold for a correct value to be learned.
Where did you come up with this? MOT_SPIN_MIN,0.125
Did you follow this? Setting Motor Ranges
Some ESC’s may require what you have.
Then Tune using the process @amilcarlucas has suggested.
Hello Dave, After looking through the info you sent, I changed the parameters and did a hover for 2 minutes in alt hold as mentioned, and then, I did another test in loiter mode, and both flights were successful. Still, there is an issue with the high sensitivity of the remote controls which are reacting too fast it might be an issue for someone who is learning and is not as stabilized fully. Do I need to do more flight tests in a while for it to keep learning the correct value?
These are the logs for alt hold mode
These are the logs for loiter mode
No, this step is complete. Move on to tuning.