transmitter FlySky FS-I6 (I have set the PPM output and the mode 2)
FS-IA6B receiver.
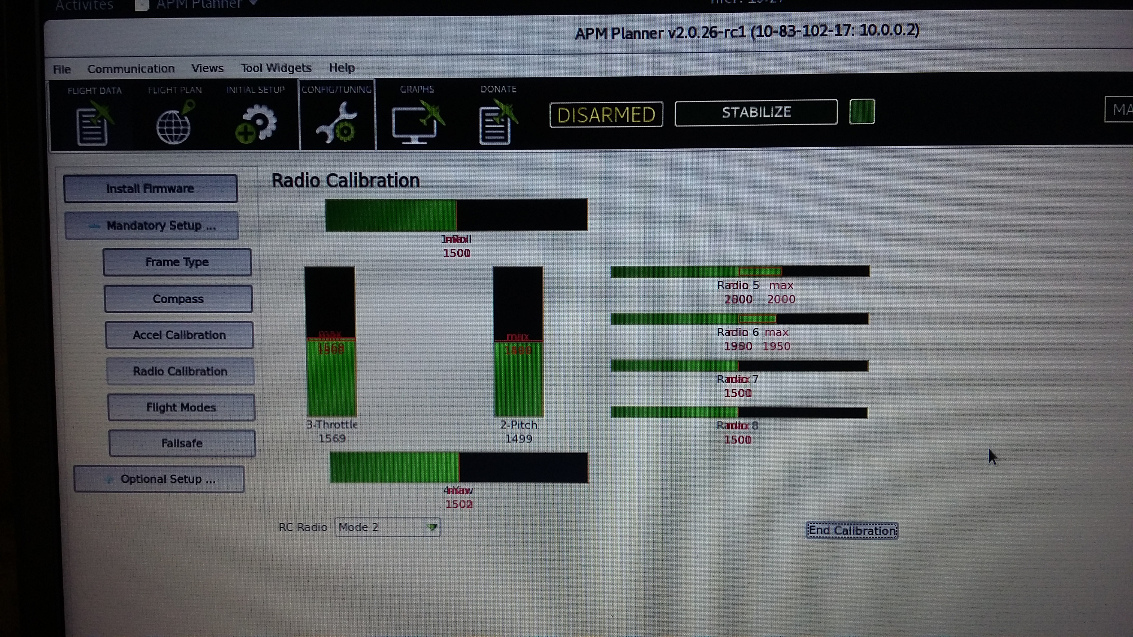
I am using APM Planner 2 as ground station application and the wireless of the rpi0W. The communication between APM planner and the PXFMini+RPI0W is ok.
The transmitter and the receiver are well binded (continous red light on the receiver).
The first step is to calibrate the RC using the APM Planner. And I do not manage to do this.
The green bars do not move in realtime when I move the sticks.
Have you checked on Erle Forum ?
There is an issue with the receiver PPM signal on the RPI, make sure your ArduPilot release is ‘‘approved’’ by ERLE. You can ask @lander for more information and you can check on this forum by searching PXF MINI.
Basically this problem deals with the way that RPI handles the PPM signal interrupts under linux.
Many thanks for the replies.
I have posted a message on Erle forum and I am waiting for a reply.
When I move the stick, the green bars move some time after. I thought the problem could be parameters to tune in the transmitter or wifi interference.
The fs-ia6b is directly connected to the pxfmini.
With the flysky transmitter I have ordered, there was a fs-ia6 receiver, I have just ordered a ppm encoder to test with this receiver.
With the quadropter kit, there was a CC3D flight controler, I could try to make it working too.
Using APM planner on windows and using helicopter fixed pitch on the transmitter (dont know which one was the problem), I manage to calibrate the RC and to enter in ESC calibration.