I finished my Single-Copter, you can find several videos of it here. That was my first ever copter, I higly suggest to anyone to not build a Single-Copter without any experience before (like me) because it is the worst frame type. It’s fun, yes, but VERY unforgiving.
In this thread I’ll give you advices on building your own based on the choices I’ve done for my build.
Weight : it will be heavy, mine is 900g. I initialy calculated for 1kg of thrust for less than 700g of wheight, luckily I have more thrust than expected (1.3kg I think). My structure is not heavy (150-200g), but the electronics add up quickcly for this poor single motor.
Prop : I would not advise anything less than 10" 4.5 (that’s what I have with a 4S and a 900kV brushless). You won’t be able to lift anything smaller since the electronic does not scale with the prop size.
Fins : MAKE THEM BIG it’s the heart of your copter. Mine are 12cm long (I made them too small 2 times in a row : 4cm and 8 cm) and follow this kind shape (it seems nice to me … yeah I hate fluid dynamics)
Structure : It is bound to break if you crash the copter. It’s impossible to do something strong (and light) with those 12cm fins while dodging the big-ass propeller just above/below. With more thrust you may be able to build something strong. BTW everything I’ve done is 3D printed using colorfab LW-PLA (only 200g with 3D printing is quite impressive, and foam is also a good alternative).
Legs : don’t make them springy if your thrust control is below the center of gravity. If your thrust control is below the center of gravity, the copter is unstable when the legs touch the ground. So you have to make them wide and rigid.
Center of gravity : ALWAYS CENTER THIS BAD BOY !!! and make it as far as possible from thrust rotation point (i.e. from your fins). This will help with stability a lot (On mine I can slide the battery around to help with the balancing) (also, levelling the copter is hard, I built a support to align the motor rotation axis with the gravity)
Tuning : First tune the yaw on a string. With that you’ll see if your fins are long enough, they should not be far from straight while stable (see my close up videos to see the stable angle on mine). Tuning roll/pitch with a string is very hard because it changes the dynamic a lot when under tension. If your TVC (thrust vector control i.e. fins) is below the COG (center of gravity), the string should be attached below the COG. Otherwise the string should be above the COG (not too far away) [Edit : wrong see my comment]. If you do this, the dynamic while the string is under tension will not destabilise the copter PID. Personaly I was not able to finish tuning with a string, it’s really hard if your TCV is below the COG.
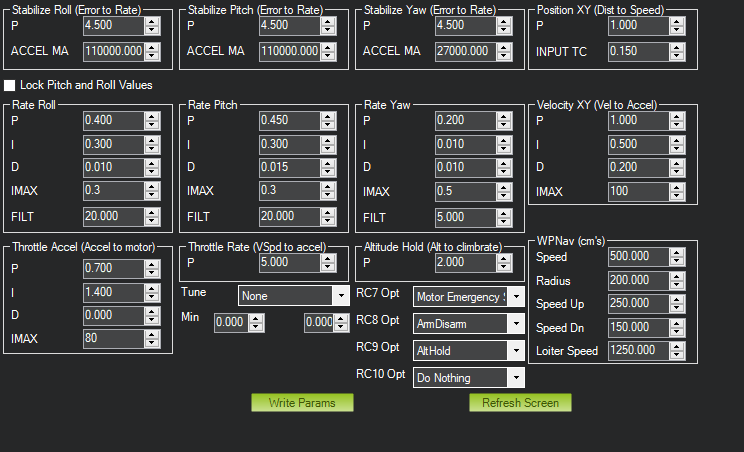
My tuning (D is quite important to counter the gyroscopic precession) : (I’m still looking for the perfect tune, and I’m afraid of autotune)
Servos vibration : because of the masse attached to the servos (a 18g fin) the servos tend to oscilate if there is no friction to dampen it. You simply need to add friction where you can to stop it.
And I think that’s all folks, feel free to ask questions and propose some improvement !
Currently I’m working on filtering the vibration with the Notch Filter before tuning the roll/pitch PID more precisely.
If your TVC (thrust vector control i.e. fins) is below the COG (center of gravity), the string should be attached below the COG. Otherwise the string should be above the COG (not too far away).
After thinking more about it, where ever your TVC or COG is, attaching the string below the COG seems to be better. IDK if someone with a TVC above its COG will ever try but for my configuration (TVC below the COG) that was the case.
I mainly say this because it was stable with my copter, so take this with a grain of salt, but here is why :
With the string (under tension, theoricaly you don’t want that tension but in reality it will always happen at least during take off) below the COG, the copter wants to flip and the PID (roll/pitch) will keep it balanced. The important thing is that you do not need a lot of thrust for the PID to work on the balancing with this configuration. You can already troubleshoot here, and that’s not possible with the string above the COG (the copter is stable and does not flip nor need the PID). Here you can build up thrust and the PID will be working all along the way, to hopefully go straight up.
With the string above the COG you can’t test the balancing up until the string becomes loose and it’s much more difficult. You can’t do any low thrust test. I also suspect that the control loop + string make the Copter higly unstable when the string is above the COG, mine was oscilating like crazy and going everywhere.
If you are using an enclosed propeller/fin design like @flyingwhere, you may gain thrust and fins efficiency. I thought you’ll lose thrust by doing so, but after doing some research it’s quite the opposite…
Hi one thing I’m struggling with is getting my servos to work properly, the roll isn’t working properly an it should be 1 and 2 but it’s only 4 that reacts to the roll
Great work on the build and getting it to hover, it will be inherently unstable because of the weight being above the thrust, and also the relatively short rotor diameter gives minimal gyroscopic stability (compared to an inverted traditional heli with 600mm blades for example)
Well done to get it flying at all
@ANTONY_MORAN You found me with youtube so you are new here. If you have a problem specific to your instalation of ardupilot please make a separated post in the sub-forum you find appropriate in the ardupilot forum (for exemple here is the Single-Copter category). More people will see it and I want to give general advice in this thread, not solve specific problems from everyone.
In your post please provide more information (what you’ve already tried to solve the problem), now I can only tell you to check your wiring and if the servos are not broken.
Yes, you are quite right!
My background in flying very stable flybar-head glow Helis, (on which pitch and roll need no electronic stabilisation at all) led me to wrongly believe you were having trouble tuning your thrust vector rocket due to weight distribution.
Thanks for the link
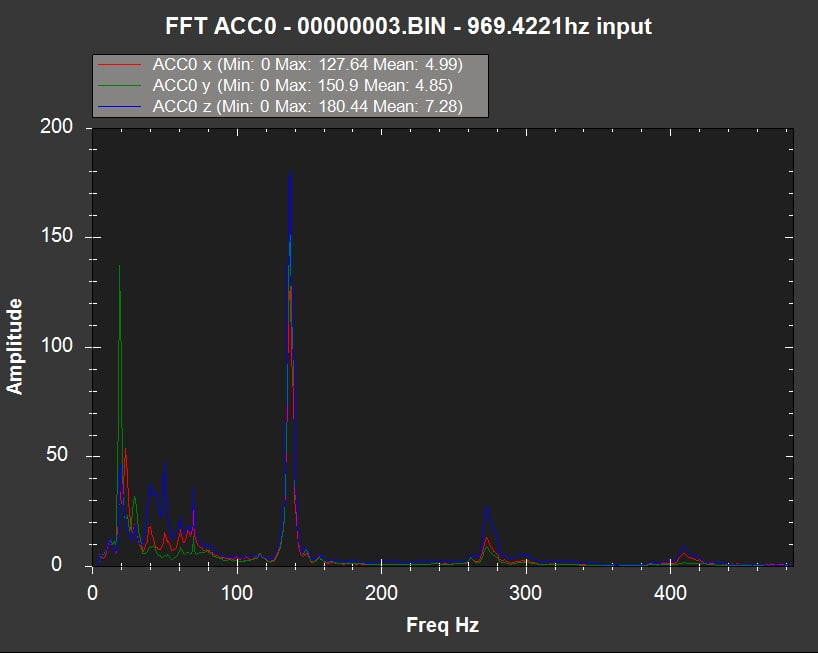
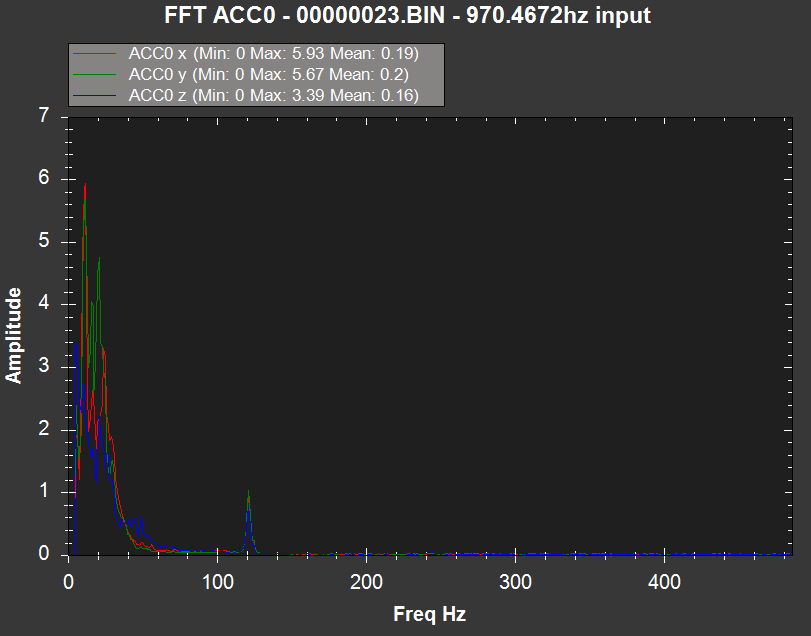
I manage to suppress the vibrations with the notch filters !
I had two huge resonance : prop at 150Hz and servos at 17Hz. The PID of the servos was unstable because of the mass of the flaps. NGL I’m very impress by the quality of the fix 17Hz notch filter, I never though it could be that stable. (the settings are : center freq 17Hz, bandwidth 12Hz, attenuation 23dB)
Had similar issues here and happened that when flashing CoaxCopter, some previous Quad settings were passed so I reset manually to default params and started over the setup: now all works.
This will be hard to hear, but the third ever successfully flown Single-Copter of the forum is dead : https://youtu.be/guUAjl5ioWU
I’ve ended the project and I’m now working on a 7" quad with/for a friend (reasons why are quite personal, it’s not just the death of the esc+motor). It was fun and I hope to have helped some of you with my posts.
I’ll continue to answer questions in this thread if you have some about your Single-Copter. And I’ll surely be back with another copter (surely a quad) in a few years when my life will have stabilized.
I’m impressed. 've seen many singles, but none pulled out and fly so stable so quickly.
Do you share CAD of your 3D printed parts somewhere? If so could you get us a link?
What is the brand and # of the motor you used, the servos etc… these details make a difference, as devil is in the details
Thx
Well thank you. Personally I’m very impressed by this design SingleCopter of Benjamin Prescher on Ardupilot - #9 by juandediosyanez that @juandediosyanez is working on, and you will find precise documentation about it. It has not run ardupilot yet, and I haven’t worked on it so I don’t know its limitations, but it looks better than mine (no hot glue and zip ties? it this dark magic?).
I’ve posted my 3D parts here in the past : All the 3D printable part of my 3D printed Single Copter . You’ll have .stp and .stl , but this was not made with CAD but with Catia so I can’t asses the quality of the .stp on CAD.
I strongly advise you to not blindly copy my parts, but redesign them to understand (or get rid of) the weak points and how to put everything together.
Here are the details that I should have written months earlier :
Motor : 900Kv MT2216 TMotor (ESC : 20A T-motor, prop : 10" x 4.5")
servos : shitty 9g servos from amazon that break all the time (have some spare and don’t hesitate to open them to switch broken gears with one that works from another broken one)
For those who don’t know what else is needed and may end up here, if I recall, you need : Computer (Navio2 in my case), power module for the computer, 5V BEC for the servos, RC transmiter (FrSky Taranis X9 Lite), RC reciever (FrSky R-XSR), battery (4S 2500mAh LiPo), LiPo Battery Voltage Monitor (safety).
Thanks a bunch!
This helps a lot to get me started. I did a number of single copters around shrouded 5 inch props. The total weight was about 700g. Way too heavy to make them fly longer than 2 minutes. As you correctly stated - all the electronics make for the most of the weight and do not allow to reduce that weight and power consumption. The only way to increase efficiency and extend flight time is to go with larger size prop. My goal is to achieve 15-20 minutes of flight time and the 10 inch prop seems just right for that.
12 inch would be more efficient but it becomes bulky, and it would be hard to 3D print parts of that size. I see that I can transfer all the electronics from my 5" copter and still have enough lift left for Lidar and a flow sensor.
I also use 10g servos but of good quality, digital, high resolution, with metal gears.
My only concern is the motor you used. Seems to me a bit small for the prop. May want to overheat. I think I will start with a 950-1200Kv 3635 size motor just to be safe.
Thanks again for the info and congratulations on your design. I learned from you about those notch filters!
Could you tell me which plot tool did you use to plot this Freq versus Amplitude graph ?
I cannot find it in Mission Planner, APM Planner 2 nor QgroundControl.
It was mission planner, but I do not remember where. If you look at how to use the notch filters in ardupilot, how to get those graphs should be explained somewhere because, it is an important part of the process.