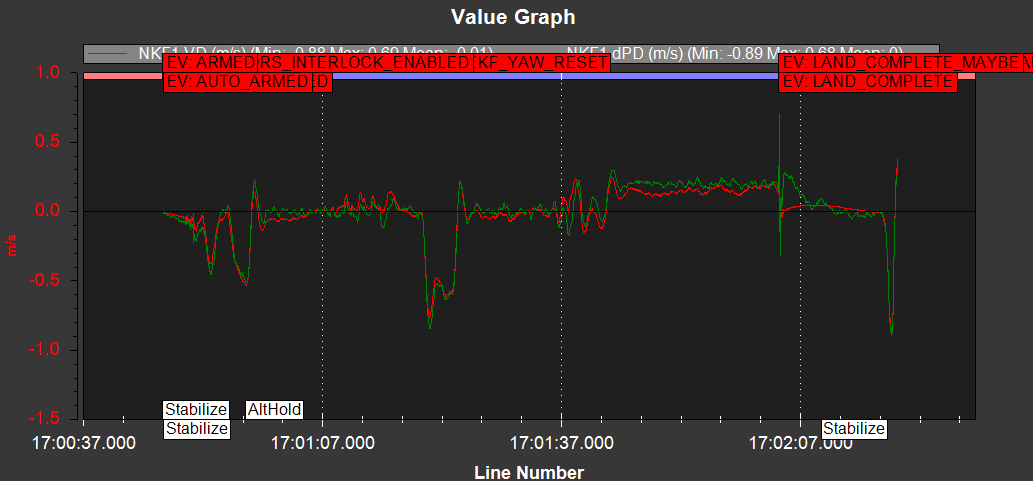
The climb rate does not correspond to the vertical speed, is it a bug ? Am I dumb ? or did I misunderstood it ?
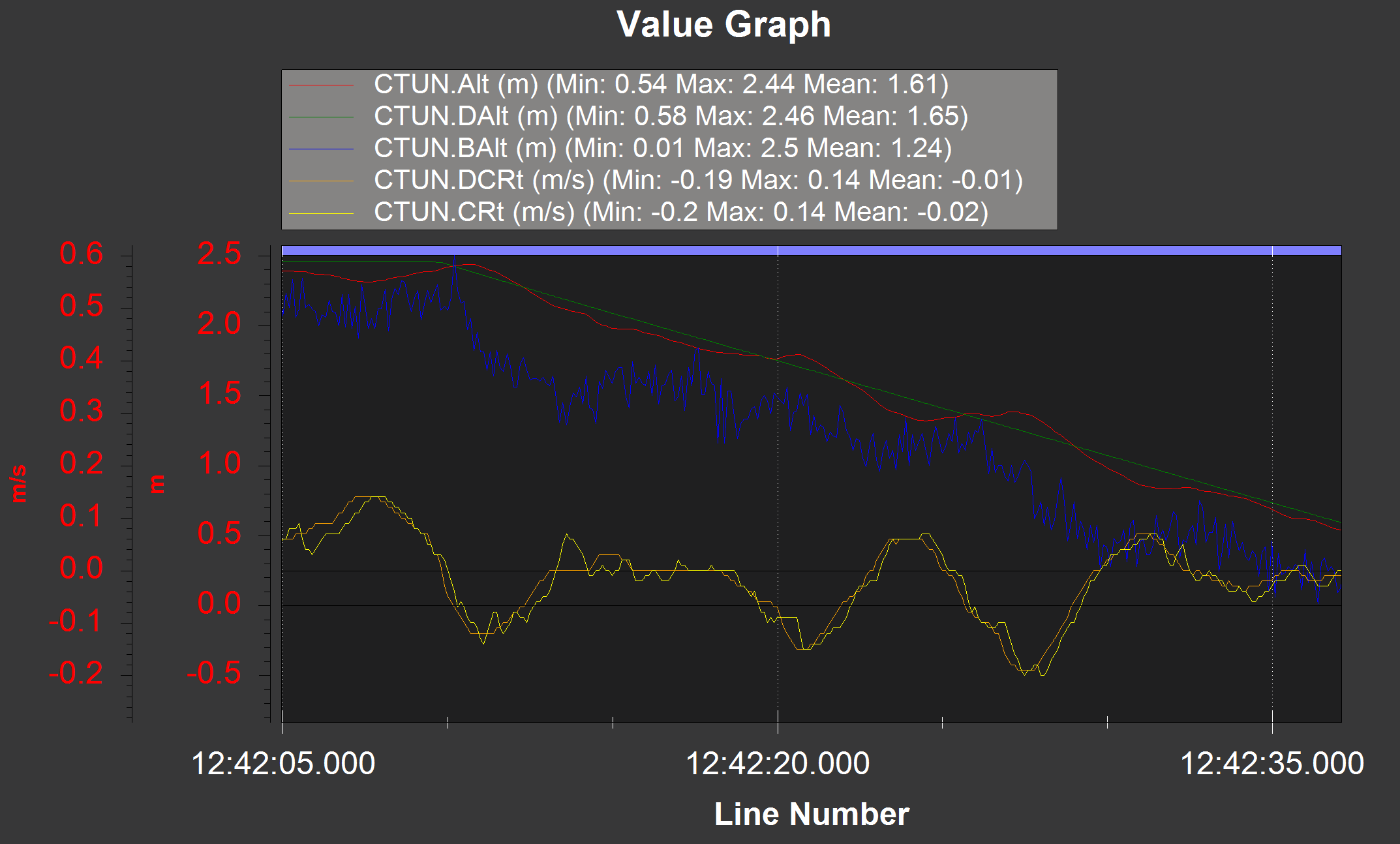
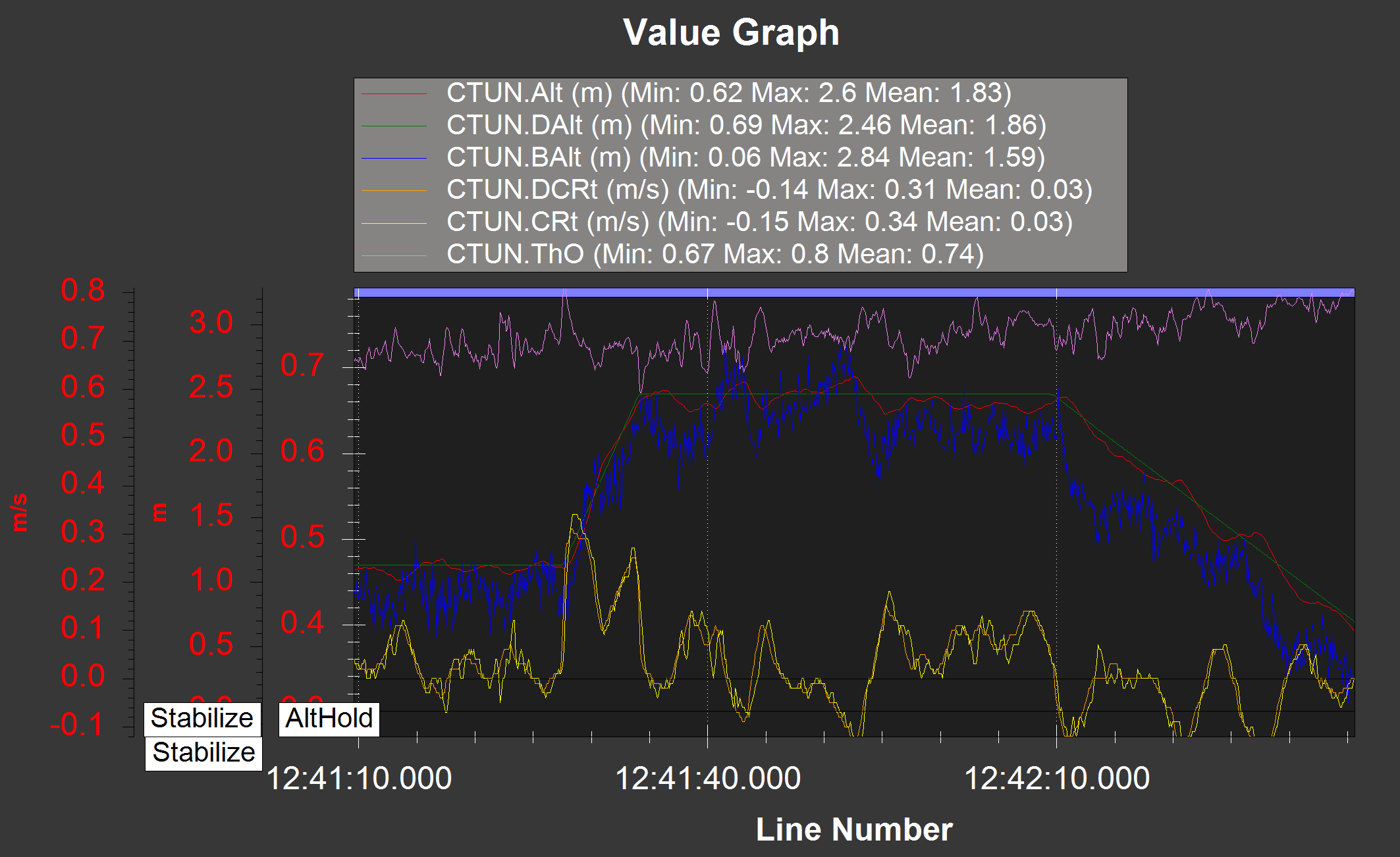
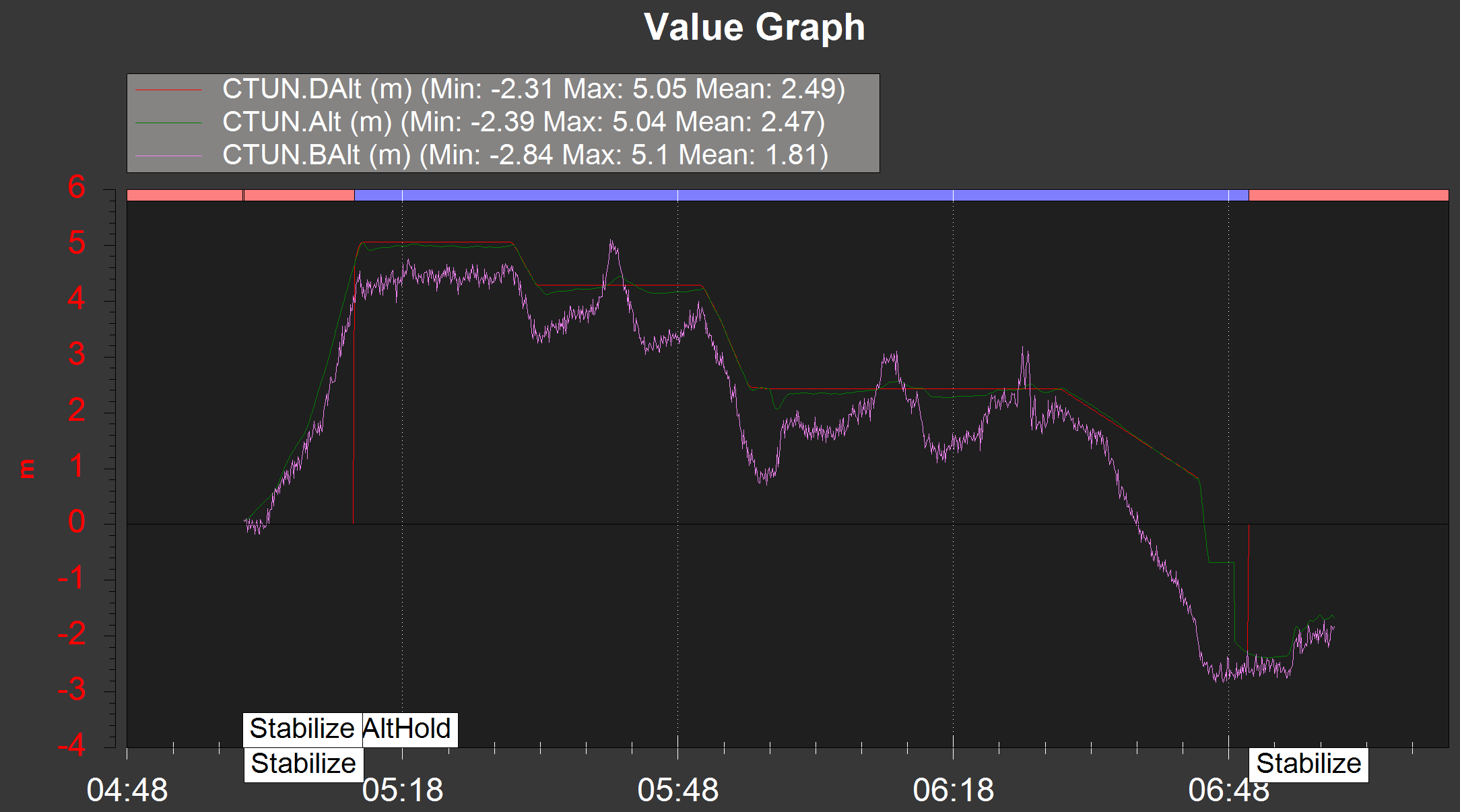
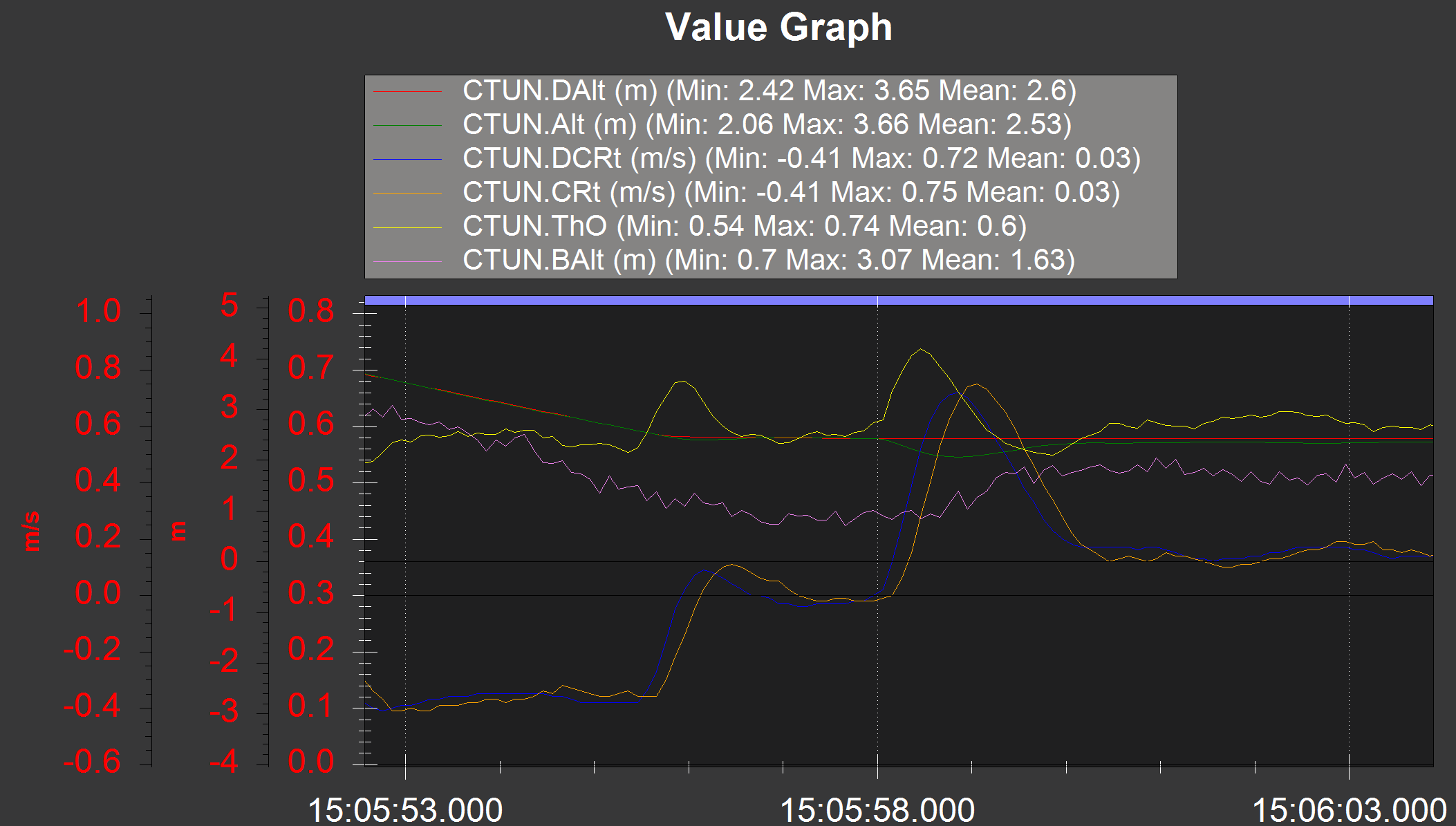
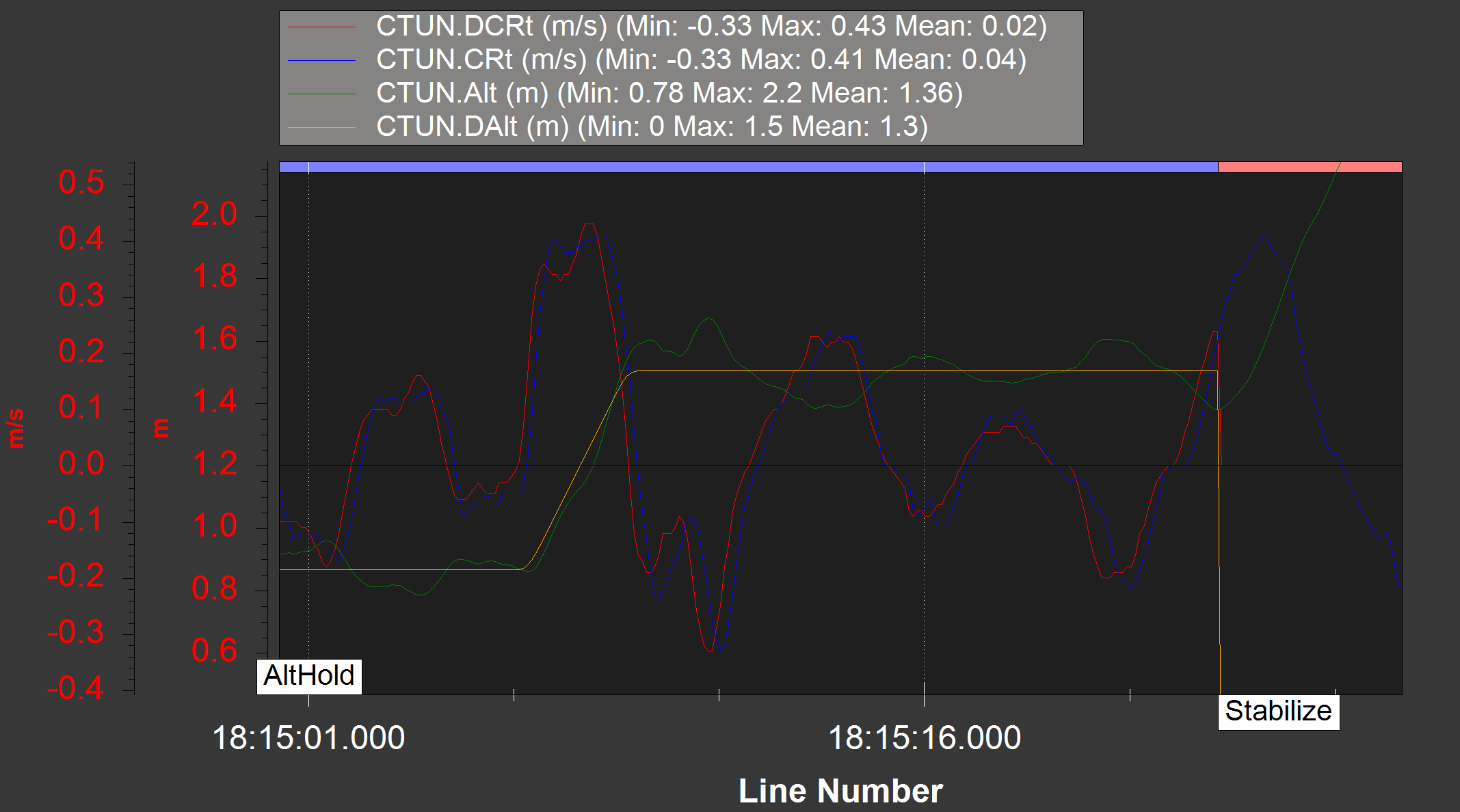
In this log you can see that the climb rate (CRt) does not follow the slope of the altitude (Alt) :
https://drive.google.com/file/d/1YsDk0q3tD0W1t3feBvZ1WuLQcG8JFNg5/view?usp=sharing
Because of this I’m struggling to tune AltHold, I don’t understand what’s happening in the PIDs. The climb rate PID is 100% fine : Desired Clim Rate is realy close to the Climb Rate. But the climb rate does not translate to an increase in altitude. I think that’s why AltHold is not working well. What am I missing here ?
I followed the tuning process here and here. AltHold has been working fine (after much effort) until today when I added the GPS, but after checking previous logs the climb rate was already “wrong” before and I had already added weight to the copter before. So, it does not come from the additional weight of the GPS. I don’t think it comes from some new GPS vibrations either because VibeXYZ is low at 2.
Also, mot_hover_learn was set to 2, it had time to converge before this log and I changed PSC_ACCZ_I and _P accordingly.
Also I’m flying a Single-Copter, but I don’t think that’s relevant.
Anyway, is there is problem with the climb rate ? or am I the problem ?