If you did, how can you get it wrong. Then your motor numbering is wrong or frame class and frame type not tally. No propeller, stick masking tape to verify.
Drone don’t lift, flip and crash, as what the video shows.
You have to have an answer to yourself towards this question. Do you know why the rotation direction and motor layout are important?
Flip on take off attempt is almost always a motor order or direction problem. Either because Motor Test wasn’t used or it wasn’t understood what motors should run when the A-D buttons are pressed.
You should have visited this post before building that. Hardware to avoid
I think it’s my bad. I did the motor test and everything seemed to work fine. Then one of the motors stopped working, so I replaced it with a new one purchased from a different website, I assumed the color coding would be the same, but looks like it was reversed. Now I have corrected it, and I’ve double-checked the pin numbering. After the crash, the propeller broke. I’ve purchased a new one. I will update you, once I test them. Thank you so much for your input.
I think while waiting for your parts delivering, you should reference this page and understand the steps. Another thing is the thrust weight ratio for your drone. You may have to find it out. Commonly is 2.4 times. Racing drone is even higher. Low Vibration and low noise are the keys towards good stable flight.
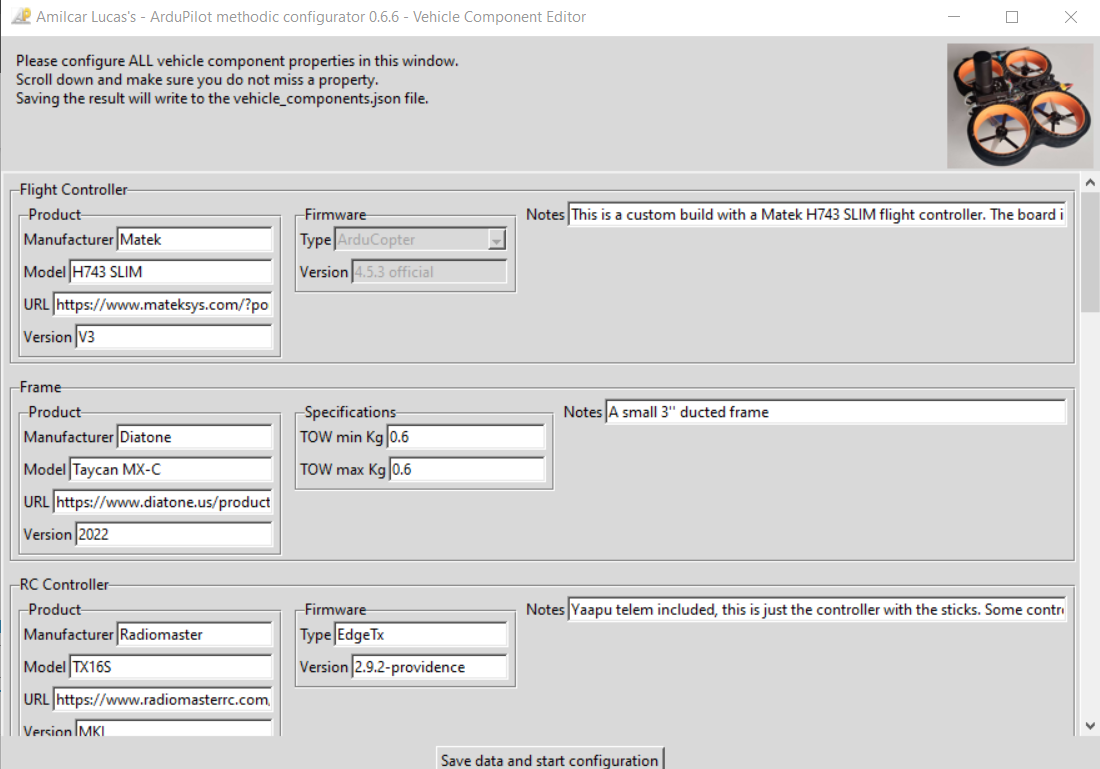
I got the new propellers and I checked the motor rotation using the Motor Test. Also, I also connected the pins as per the below image. I have added a landing gear as well. Please see the video. When I increase my throttle, there is a flip. What do I do!? I don’t know where exactly I’m going wrong. I just need this to fly for 30 seconds.
Is this the correct order given in the below image? I followed this. What are the steps before the first flight? I’m new to this, I’m not aware of this.
Yes, but your video placement is 90 degree rotated.
Your drone nose heading in the video is not same as image.
Remove propeller and do a motor test video instead. Place your drone the same heading as the image. Use the lowest throttle % enough to start the motor spinning, increase spin duration, like 10 sec, Stick something to motor so you can tell the motor rotating direction. Patiently press the top most button to start A motor and verify spin direction, follow by next below button to start motor B…
Do the tests as described by @Jai.GAY and after that do NOT take off.
Use the ArduPilot Methodic Configurator software and follow it’s instructions. It will tell you when it’s time to takeoff
Looks like Motor 4/B is going CCW.
It amazes me how many people get this dead simple process wrong.
“I triple checked…” and then it’s wrong still.
Do clocks turn different ways in parts of the world? Is there another meaning to counter?
@dkemxr have a looked at this video. It’s the same video I shared earlier but I’ve slowed down Motor B now. The Motor B is rotating in CLOCKWISE direction right?