BlueMS
March 19, 2018, 12:29pm
1
Hi, there.
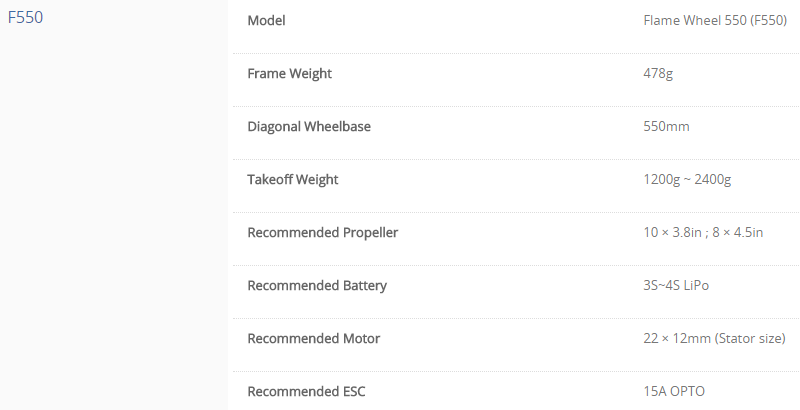
I have my first drone with Pixhawk 2.1, F550 Frame set(in motor, esc…)
The motor works but does not take off.
I checked props and ESC wiring.
Message doesn’t show any error(e.g. PreArm)
The below message is my copter’s output when Pixhawk connect power.
Could you share a video ?
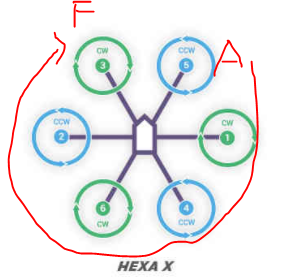
1-“I checked props and ESC wiring.” I assumed prop directions are correct
http://ardupilot.org/copter/_images/MOTORS_Hexa-octo-y6.jpg
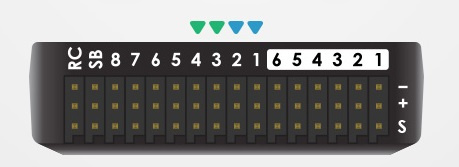
2- I assumed Autopilot and ESC connection correct
3-Did you perform motor test ( without propeller !! )
http://ardupilot.org/copter/docs/connect-escs-and-motors.html?highlight=motor%20test
4-What is the behaviour of the system while the throttle is at its maximum level ?
Regards
1 Like
BlueMS
March 20, 2018, 2:50am
4
This Video is latest test yesterday.
Oh my gosh!
Motor test success!
BlueMS
March 20, 2018, 3:02am
5
Checked props and motors direction today.
OldGazer:
Aircraft is too heavy.
I have no scale and My Copter’s real weight is unknown.
I bought F550 Set(with motor,esc and props) and don’t add other parts.
Where is THR_MAX param?
hi @BlueMS
The problem is still going on. You don’t have weight issue , your prop and motor are enough for your setup.
My last suggestion is perform ESC Calibration ( Pls Remove Props ) -> Link
You are right , there is no THR_MAX .
Which mode do you use when take-off transition ?
BlueMS
March 20, 2018, 7:44am
8
Thanks you @mehmetyldz87
Now, I know ESC Calibration, and success.
And… What’s mean “GPS: No Fix”?
If you want to fly indoor , and you should disable the GPS .
Here ( Pls follow those steps ) -> http://ardupilot.org/copter/docs/indoor-flying.html
or
If you want to arm your copter in GPS denied enviorment for test purpose ( just for test ) , you should disable pre-arm safety check
BlueMS
March 20, 2018, 8:21am
10
Wow. Thank you @mehmetyldz87 !!
I will remember this information for later.
Have a nice day!
OldGazer
March 20, 2018, 11:00am
12
I dug through my parameters (AC3.5.5 on a Pixhawk) and I couldn’t find Thr_MAX… I must have been thinking about AC3.2.1 on an APM…
No GPS fix means the GPS does not have a lock on a sufficient number of satellites.
Disabling the pre-arm safety checks is just a Band-Aid, and should you set up a GPS flight mode like Loiter, or Position Hold, the quad may fly away. Also, not having a GPS fix will prevent the quad from switching to RTL should the low batter or loss of signal fail safe trigger. Food for thought.