I have calibrate esc (Racerstar RS20Ax4 V2 Blheli, configure in D-Shot by default), I have calibrate compass and accelerometre, and I have calibrate my tunigy 9xr all with mission planner.
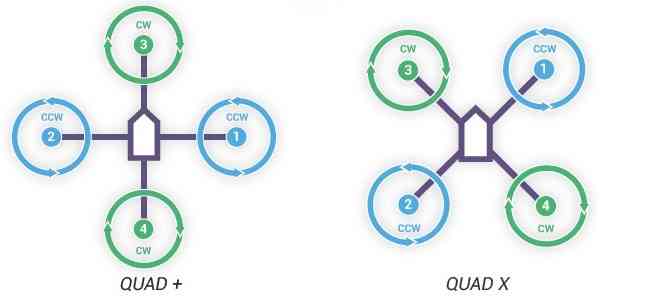
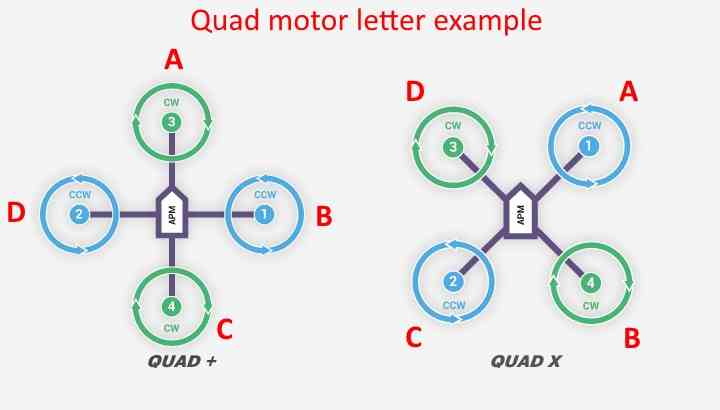
I have verify the sense of motor (with mission planner) and the sense of propeller :
I have succefful manually upload arducopter 3.5.1 (with px4uploader.exe and CMD). I have take copter-3.5.1_V2 firmware (because install directly with mission planner does not work).
Any know how is wrong with my setup ?
Many thanks in advance, if i find nothink, i try to mount an old crius with multiwii for test.
From the logs we can see that you gave it max throttle which should have produced a lot of thrust. You should have only given it a little throttle to get the motors spinning up.
I see that motors 1 and 2 start out higher than the others but later motor 4 goes to max but that’s not what the video shows which could me that the ESC’s are not reacting to the inputs equally. Motor numbers are not the same order as A,B,C and D in Mission Planner.
I would remove the props and put it in ESC calibration mode and see that all the motors spin up the same.
I have a similar copter with that same radio and X8R Receiver and have built 2 other units like that and have no issues with takeoffs.
I have calibrate esc (Racerstar RS20Ax4 V2 Blheli, configure in D-Shot by default), I have calibrate compass and accelerometre, and I have calibrate my tunigy 9xr all with mission planner.
Ardupilot doesn’t support d-shot, make sure you are in oneshot or normal pwm mode. Not saying it has anything to do with the crash, just point out to start with.
The video looks very much like either your motors are connected in the wrong order, or else you accels aren’t calibrated, or your flight controller is not in the correctly configured orientation. Is your GPS at the front of the craft, with motor #1 to the right of the gps?
About motor connections you should check , that motor A (as in order for motor connect you posted) goes to output 1 of Pixhawk, motor B goes to output 4, motor C goes to 2 and D to 3 .
With Blheli it is a good practice to use Blhelisuite to configure Esc because by default the ESC programming feature by radio is enable and that can cause some mistakes in configuration.
From the video I can see that the motors are connected correctly and are in the correct order. The problem as I see it is they are not spinning up correctly which would indicate not calibrated correctly.
When the ESC’s are in calibration mode and you have lowered the throttle there is a beep that is heard. From there you can slowly raise the throttle and they should all spin at the same speed.
No props is recommended as it could fly off during calibration.
Calibration has nothing to do with compability.
You can perfectly calibrate an Esc , this means seittng the minimun e maximum values for throttle signal coming from receiver and have totally wrong Esc parameters for the motor you are using or for your flight control.
As suggested use an Arduino to connect to your esc and make the setup with blhelisuite.
I have an RS20A 4-in-1 working with a PixRacer running ArduCopter 3.5. I had to set the esc’s up via a programmer (I used an old Naze32 and the BLHeli chrome app). MissionPlanner calibration didn’t seem to work for them.
you know that if you pull the throttle to zero in stabilize mode it stops controlling the attitude and will crash?
Maybe you should start with AltHold mode.
{kind=link}
{kind=link}