@ArduNoob I just realized something I wasn’t thinking about. When using a rover, many including myself, use only the right stick. This makes the throttle self center. Pitch on the transmitter becomes throttle and aileron is steering. I use only the right stick on my boat. I cant believe I did not think of this. But none the less the steering input to the APM still goes to 1 and throttle goes to 3.
By doing this method would it help my situation? How can I connect both on the right stick to do this?
You take whatever out put on you receiver is for pitch, Usually 2, and put it to APM input 3. Output 1 from the reciever usually is aileron, Except Spektrem, so that is input to 1 on the APM.
This way you have throttle and steering all on one self centering stick. I forgot about this because I also have a sailboat that is set up to use both sticks.
No, it will just give an alternative channel for throttle. You could do it that way if you wanted to.
So is it at neutral with throttle center stick with forward/reverse higher/lower as I asked?
Yes, as long as your RC_TRIM agrees with your centering of the throttle stick. I use a joystick sometimes with a slider for the throttle and the hardest part is getting the slider just perfect in the middle
I was asking him about his current setup. I’m really just trying to determine if the most basic of configuration has been done because there is conflicting information.
I’m done for the evening. I’ll check in around 10 or 11 UTC. I’m minus 5 hours here
Hi David. Could you let me know on the pixhawk where the analogue sensor interface pins are located? I’m looking at pictures on google but can’t seem to find it. On my apm 2.8 the ports in question are here on the left:
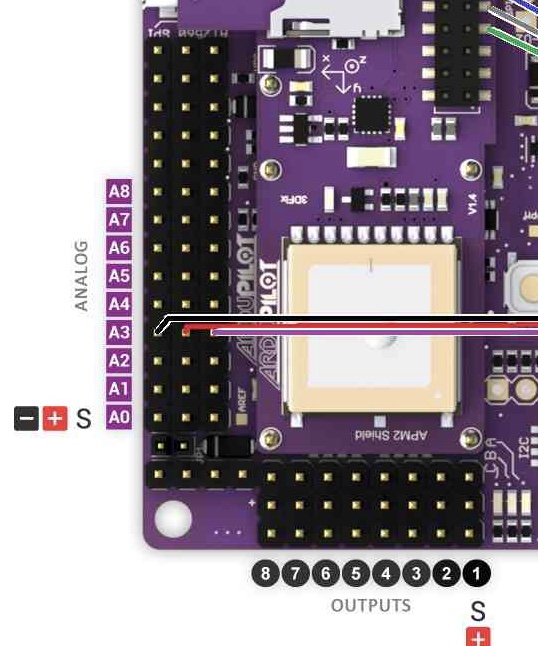
Where are these used on the pixhawk? I’m using A1 for a device I have so once I buy the Pixhawk I’d like to apply the same setup. Thanks
Hey Pete. So would it be analogue to digital converter 6.6V which would be the same as the A1 port on the apm?
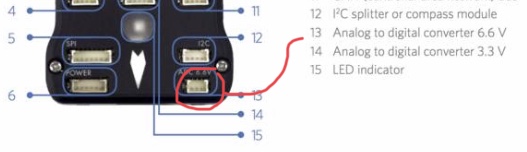
yeah, you don’t get quite as may analog ports as sensors have mostly gone to digital
All I need is one so I’m happy if it’s an easy crossover from the apm to the pixhawk regarding the analogue port. That’s great then.
All I need now is about £300 to buy the Pixhawk 2.1 with The Cube & Here V2 bundle.
My rover rc cost me around £200 with the lipo battery. £50 for the apm 2.8 bundle. Transmitter & receiver around £50, so roughly £600 spent already on something that still isn’t able to do a simple 4 waypoint auto mission. Now about to spend another £300 on the pixhawk bundle so all together around £1,000. Should have bought that Aion Robotics and saved myself & all of you helping me allot of headache
1 Like
Just ordered this:
Are you going to give up on the APM 2.8? Or get it going to learn about Ardupilot a little while you wait? What you have now is actually capable of doing auto missions. Its just out dated with the latest code and technology. It still can do a lot.
I’ve decided to buy the pixhawk & start again. Maybe the apm is more than capable but everything I try is met with another issue. It’ll be arriving tmo via amazon so I’m gonna give it a shot with the pixhawk & hope that it’s a smoother journey in getting the rover functioning.
O.K. If you need help let all here know.
I’m sure ile stumble into hurdles just like I have with the apm, or something like a miracle might happen and it works instantly😁. Either way I will update you all on my progress and as always I’m thankful for all your time in helping me.
Does it make you feel better to know that I am learning a lot from your struggles without leaving my chair!!  Thanks for sharing…
Thanks for sharing…
My only concern is it doesn’t look like it comes with a power module or GPS with an external compass. That can be handled later though.