Still isn’t working in Acro mode. Making the wheels go crazy and fast
When I save the switch as Acro it’s saying it’s being used as RTL
I don’t remember a lot about Rover 2.5 and my old APM 2.5 but I thought output 1 was steering and output 3 was throttle.
This is right that’s what I have it has, the switch that actives the auto mode is plugged into CH8 on the APM and CH6 coming out the receiver
And the throttle out of your receiver is going into input 3 of the APM? and steering out of the reciever is going to input 1?
http://ardupilot.org/rover/docs/common-connecting-the-radio-receiver-apm2.html
This says mode should be input to 5. I just don’t remember all this and my parameter list is on a computer in the car now because I need it tomorrow morning for my Arduboat.
Yes that’s the way it is, throttle into CH1, Steering into CH2, Switch on transmitter going into CH8
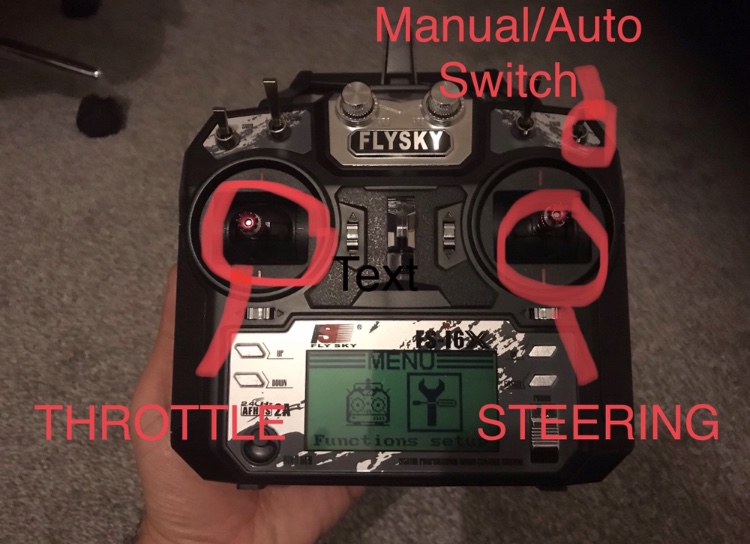
Yes but the throttle output from the receiver should go to input 3 on the APM. steering output from the receiver should go to input 1 on the APM
Default for MODE_CH for Rover is 8 for whatever reason. At least for 2.51beta it is. I change it to 5 off the bat so it’s the same as everything else I have.
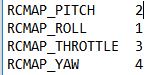
That channel order doesn’t make sense. You are going backwards man, this is how your channels are mapped.
Are you using a Pixhawk now? Or still an APM? Almost nothing you find in the wiki can be applied to Rover 2.5. No Acro mode, no pid achieved, pid desired tuning, you can not use anything other than the full parameter list in MP and expect it to do what it should. Buy a Pixhawk if you not already have.
2 Likes
@dkemxr is this one any good?
I can’t speak of the quality but I’ve seen some people using them.
I use one of these in my rover and it has not failed me yet.
It’s as good as any Pixhawk 2.4.8. The source for these generic Pixhawks doesn’t really matter. I have a couple and they work fine.
Should I just get the pixhawk or go for this?
Only thing is will this help make things easier for me or will the pixhawk on it’s own do the job?
Cube is defiantly much better quality and the gps is excellent, but the cheap pixhawk is functional the same.
Yes, the Here GNSS GPS is excellent, I had one on my old Rover and it’s going on the new one. The additional satellites that it might pick-up over the generic M8N can make a big difference on the ground. I don’t have a Pixhawk 2.1 in any craft but I’m sure the build quality is superior to the generics FC’s.
Note: I have noticed in the logs you have posted relatively low satellite counts (6-8). I’m not sure if it’s your hardware, geographic location or what.
Thank you for the parameter list. Should I input all parameters in the Full List Tree to be the same as the ones you’ve sent me? I’m happy to do that when I get the time if you think it would help
That’s like asking where the printer port is on your new laptop… Or where is the floppy drive. This is irrelevant.The devices that were analog are different interface protocols now. Serial, I2C, SPI, CAN, etc.